


更多相关产品
- LGPFSM-3网络型可编程控制器综合实训装置(西门子)
- LGPFOR-2网络型可编程控制器综合实训装置(欧姆龙)
- LGPFSF-1A/1B可编程序控制系统设计师综合实训装置
- LGPFSF-2A/2B可编程序控制系统设计师综合实训装置
- LGPSOR-1PLC-步进伺服控制综合实训平台(欧姆龙) (配二轴定位模型)
- LGW-XC01型 小车运动控制模型装置
- LG-ADMC01型 工业自动化电气控制综合实训考核装置
- LGSX-01型 PLC可编程控制器实训装置
- LGSX-01A型 网络型PLC可编程控制器综合实训装置(PLC+变频+电气控制+触摸屏)
- LGSX-01B型 PLC可编程控制器综合实训装置
- LGSX-02B型 PLC可编程控制器、单片机开发应用及变频调速综合实训装置
- LGSX-02A型 PLC可编程控制器、单片机开发应用及电气控制综合实训装置
- LGSX-02C型 PLC可编程控制器、变频调速综合实训装置
- LGSX-03A型 工业自动化综合实训装置(PLC+变频器+触摸屏+单片机)
- LGSX-03B型 工业自动化综合实训装置
- LGH-01型 车身保全三菱Q系列PLC实训与考核综合装置
- LGH-02型 车身保全三菱Q系列PLC实训与考核综合装置(含电机执行机构)
- LGSX-04A型 单片机、自动控制、计算机控制技术、信号与系统综合实验装置
- LGSX-04B型 单片机开发应用技术综合实验装置
- LGSX-03C型 工业自动化实验考核装置
- LGM-S02型 三菱PLC实训装置
- LGM-S03型 西门子S7-300PLC综合实训实验装置
- LG-ND03型 单片机技术实训装置
- LGN-05A型 计算机组成原理、微机接口及应用综合实验台
- LGN-05B型 网络接口型单片机•微机综合实验开发装置
- LGN-06A型 信号与系统•控制理论•计算机控制技术实验平台
- LGN-06B型 单片机•CPLD-FPGA开发综合实验装置
- LGN-06C型 高级单片机、EDA开发实验装置
- LGS-01B型 PLC可编程控制系统、单片机实验开发系统,自动控制原理综合实验装置
- LGS-01C型 PLC可编程控制系统、微机接口及微机应用综合实验装置
- LGS-02A型 PLC可编程控制器实验装置
- LGS-02B型 PLC可编程控制、单片机开发系统、自动控制原理综合实验装置
- LGS-02C型 PLC可编程控制器、微机接口及微机应用综合实验装置
- LGS-01A型 PLC可编程控制实验及单片机实验开发系统综合实验装置
- LGS-02D型 PLC 可编程控制器、变频调速综合实验装置(网络型)
- LGS-03型 网络型PLC可编程控制器实验装置
- LGS-03A型 网络型PLC可编程控制及单片机实验开发系统综合实验装置
- LGS-03B型 网络型PLC可编程控制器、单片机开发系统、自动控制原理综合实验装置
- LGS-04A型 网络型PLC可编程控制器、变频调速及电气控制实验装置
- LGS-04B型 网络型PLC可编程控制器、变频调速、电气控制及单片机实验开发系统综合实验装置
LG-EWK03型 二维运动控制实验平台(单片机控制)
一、LG-EWK03型 二维运动控制实验平台(单片机控制)概述
LG-EWK03型 二维运动控制实验平台(单片机控制)是集运动控制卡、单片机开发控制板、步进电机及驱动器、开关电源、XY控制平台及运动控制软件于一体的理想教学实验系统。XY控制台是一个采用滚珠丝杠传动的模块化十字工作台,可以实现平面内X、Y轴方向的运动控制,用于实现目标轨迹和动作。二维运动控制实验平台(单片机控制)系统软件包括基于轴的控制、基于坐标系的控制、命令编辑和运行、数控代码编辑和运行、复杂运动轨迹控制。

1、定位精度:0.4mm
2、X轴有效行程:230mm;Y轴有效行程:230mm;*大运动速度:20mm/s;*大运动加速度:1g
3、输入电源:220V±10%(50Hz)
4、工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔<4000m
5、装置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×75cm
三、系统结构及组成
LG-EWK03型 二维运动控制实验平台主要由步进电机控制系统和电脑桌两部分组成,结构框图如下图所示:
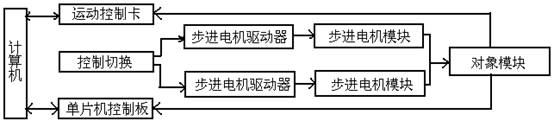
系统结构框图
步进电机二个:采用二个2相步进电动机,分别为XY两个方向布置,X轴运动行程为230mm,Y轴运动行程为230mm。
(2)51单片机开发控制板
单片机开发控制板,主CPU为AT89S52,带下载接口(编程电缆,编程软件),所有接口资源引出,供用户使用。并配置相应控制开关按钮。
(3)运动控制卡一块
32位PCI总线,即插即用
所有输入、输出均采用光耦隔离,抗干扰性强
2轴伺服/步进电机控制,每轴可独立运动,互不影响
脉冲输出的频率误差小于0.1%
*大脉冲输出频率为2MHz
脉冲输出可用单脉冲(脉冲+方向)或双脉冲(脉冲+脉冲)方式
梯形加/减速
任意2轴直线插补
*大插补速度1MHz
运动中可以实时读出逻辑位置、实际位置、驱动速度
24路数字输入,12路输出
每轴两个限位输入,可设置成无效,作为通用输入使用
支持在一个系统中使用多达16个控制卡
支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系统
(4)步进电机驱动器二个
输出电流:*大电流为2A
输出方式:光光耦合器·开路集电极输出
(5)稳压直流电源 一个
输出电流:*大输出电流为5A
输出电压:24V
输出功率:120w
(6)运动控制卡接口板 一块
为运动控制卡提供接口端子,可根据自己的需要进行相应的接线,实现接线的灵活及开放性。
(7)实验平台信号接口板 一块
用以实现PLC和运动控制卡与实验平台的信号连接,在同一时刻只能一种控制起作用。
(8)脑桌一张(选配)
(9)计算机一台(用户自备)
用于安装单片机集成开发环境KEIL C、编程下载软件,主要完成程序的编写、修改、编译、软件仿真等功能,*后通过编程下载软件装载到单片机内部FLASH ROM中运行。还用于运行控制卡上位软件的开发、运行。
硬件配置:基本配置要求P4 3.OG以上,内存至少为256M,至少有一个USB接口、一个并行口、一个Rs232串口和一个空闲PCI插槽。操作系统:Windows XP(专业版)+SP2。
四、实验项目
(一)基础实验
1、单片机的认识和操作实验
2、单片机集成开发环境KEIL C的认识实验
3、单片机在线编程软件的认识与使用
4、单片机基本编程练习实验
(二)基于51单片机控制的系统性实验
6、基于51单片机控制的单轴实验
7、基于51单片机控制的两轴联动控制实验
8、基于51单片机控制的任意路线物料搬运实验
(三)基于运动控制卡控制的系统性实验
9、基于运动控制卡控制的单轴实验
10、基于运动控制卡控制的两轴联动实验
11、基于运动控制卡控制的任意路线物料搬运实验
五、运动控制卡可用以下开发工具:
1、CBuilder Borland C++Bulider 6 工具开发的基本库函数示例程序及源代码
2、Dephi Borland Dephi 6 工具开发的基本库函数示例程序及源代码
3、Vb Microsoft Visual basic工具开发的基本库函数示例程序及源代码
4、VC Microsoft Visual C++ 工具开发的基本库函数示例程序及源代码