


更多相关产品
- LGWL-SP01型食品溯源物联网实训系统
- LGWL-GC01型智慧工厂应用实训系统
- LGHL-02型工业互联网技术应用实训台
- LGWL-JT03型智能交通及监控综合实训平台
- LGWL-CZ01型开放式车载控制系统
- LGWL-JT02型物联网智慧城市交通实训系统
- LGWL-JT01A型智能交通应用实训系统
- LGWL-NY03型智能温室大棚实训系统
- LGWL-FT02型 人工智能物联网实验平台
- LGWL-FTAI03型 人工智能技术开发平台
- LGAI-BC02型 嵌入式人工智能教学科研平台
- LGAI-RBC01型 AI侦查机器人
- LGAI-BCH04型 智能家居机器人(家居精灵)
- LGAI-BCY02型 智能移动机器人
- LGAI-BCC01型 千里眼智能车
- LGAI-BCW03型 无人机模拟飞行训练系统
- LGAI-BC01型 嵌入式人工智能教学科研平台
- LGAI-BCD01型 AI机器人底盘开发平台
- LGAI-BCW01型 舞蹈人形机器人
LGWL-GC01型智慧工厂应用实训系统
一、产品简介
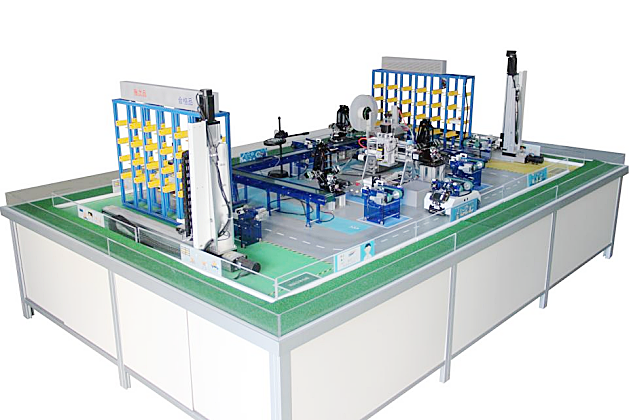
LGWL-GC01型 智慧工厂应用实训系统主要由生产线作业管理平台、生产线可视化监控平台、智能通信设备以及自动化装置(立体仓储、堆垛机、搬运机器人、机器视觉检测仪、分拣机器人、流水线传送带、AGV流转小车、加工雕刻机、贴标机、二维码识别器、光电传感器、环境传感器等)组成,通过物联网的感知控制、组网传输、数据应用等技术,在生产线作业管理平台上自定义加工流程,实现原料自动出库、生产自动加工、流水线传送、机器视觉检测、智能分拣、成品自动贴标、二维码识别、成品自动入库、AGV自动搬运等功能,支持可视化监控平台进行远程一键下单,库存盘点,实时查看加工环节、加工状态、加工结果统计展示,以及工厂环境数据监控等。
LGWL-GC01型 智慧工厂应用实训系统主要由生产线作业管理平台、生产线可视化监控平台、智能通信设备以及自动化装置(立体仓储、堆垛机、搬运机器人、机器视觉检测仪、分拣机器人、流水线传送带、AGV流转小车、加工雕刻机、贴标机、二维码识别器、光电传感器、环境传感器等)组成,通过物联网的感知控制、组网传输、数据应用等技术,在生产线作业管理平台上自定义加工流程,实现原料自动出库、生产自动加工、流水线传送、机器视觉检测、智能分拣、成品自动贴标、二维码识别、成品自动入库、AGV自动搬运等功能,支持可视化监控平台进行远程一键下单,库存盘点,实时查看加工环节、加工状态、加工结果统计展示,以及工厂环境数据监控等。
二、系统结构
系统按区域划分,有5个区,分别是原料区、加工区、检验区、包装区、成品区。
系统按区域划分,有5个区,分别是原料区、加工区、检验区、包装区、成品区。
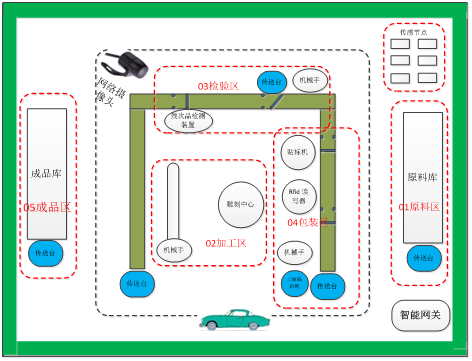
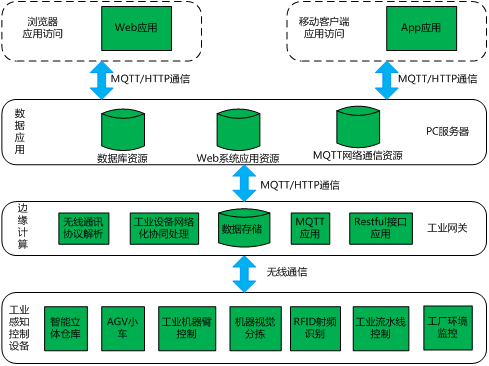
每个区都安装有机械化生产装置,通过通信节点实现嵌入式感知控制、无线自组网,由网关上的生产线作业管理平台进行本地控制,由可视化WEB平台或移动端APP应用为用户提供加工环节动态界面。系统采用B/S架构,其架构如图所示。
三、系统功能
系统按功能划分,包含8个小系统,分别是信息管理系统、立体仓库系统,AGV小车运输系统,工业机器臂控制系统、流水线控制系统、机器视觉分拣系统、RFID二维码识别系统、以及无线通信技术。
1、信息化管理系统:通过网关APP管理所有机械化设备,使用手机端或网页端远程下达工单,并可以实时获取原料、成品库存信息、生产结果统计展示(饼状图、柱状图)、工厂环境能耗数据监控。
系统按功能划分,包含8个小系统,分别是信息管理系统、立体仓库系统,AGV小车运输系统,工业机器臂控制系统、流水线控制系统、机器视觉分拣系统、RFID二维码识别系统、以及无线通信技术。
1、信息化管理系统:通过网关APP管理所有机械化设备,使用手机端或网页端远程下达工单,并可以实时获取原料、成品库存信息、生产结果统计展示(饼状图、柱状图)、工厂环境能耗数据监控。
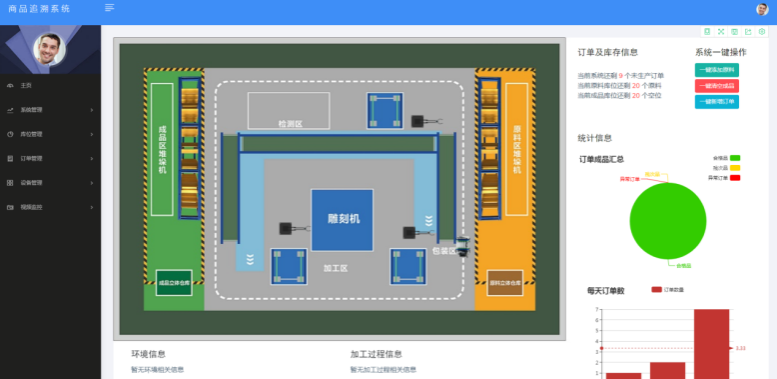
可视化管理平台首页面
2、智能立体仓库系统:在原料区和成品区利用立体仓库堆垛机、传送台,实现物品的自动下架、上架、出入库管理。
3、AGV小车运输系统:AGV小车利用磁寻迹,实现不同加工环节物品的流转。
4、智能流水线控制系统:在检验区和包装区均安装有传送带、到位检测传感器、道闸开关,用来传送加工物品,实现物品的自动化流转。
5、工业机器臂控制系统:在加工区、检验区、包装区安装有工业机器臂,由通信节点组网,并通过生产线作业管理软件控制实训物品的精准抓放。
6、智能视觉分拣系统:在工厂合格检验区,利用智能视觉检测系统可以实现对当前输送线上的货品进行残次品检测。
7、RFID射频识别系统:在工厂包装区安装了RFID射频识别设备,当检测到RFID卡号时,即对当前货品进行状态信息记录操作。
8、无线通信技术:工厂实训平台控制模块均采用无线通讯技术,使得可以远程控制生产设备动作。同时保证服务端可以实时获取生产设备的工作状态。
另外,系统还包括环境监控系统,将工厂内温湿度、二氧化碳、光照度等传感器的数据实时监测、记录。传感器的数据通过无线传输,上传到服务器进行数据处理。同时可通过网络摄像头远程视频浏览加工厂车间的状况。
3、AGV小车运输系统:AGV小车利用磁寻迹,实现不同加工环节物品的流转。
4、智能流水线控制系统:在检验区和包装区均安装有传送带、到位检测传感器、道闸开关,用来传送加工物品,实现物品的自动化流转。
5、工业机器臂控制系统:在加工区、检验区、包装区安装有工业机器臂,由通信节点组网,并通过生产线作业管理软件控制实训物品的精准抓放。
6、智能视觉分拣系统:在工厂合格检验区,利用智能视觉检测系统可以实现对当前输送线上的货品进行残次品检测。
7、RFID射频识别系统:在工厂包装区安装了RFID射频识别设备,当检测到RFID卡号时,即对当前货品进行状态信息记录操作。
8、无线通信技术:工厂实训平台控制模块均采用无线通讯技术,使得可以远程控制生产设备动作。同时保证服务端可以实时获取生产设备的工作状态。
另外,系统还包括环境监控系统,将工厂内温湿度、二氧化碳、光照度等传感器的数据实时监测、记录。传感器的数据通过无线传输,上传到服务器进行数据处理。同时可通过网络摄像头远程视频浏览加工厂车间的状况。
四、配置清单
|
序号
|
类别
|
货物名称
|
数量
|
|
|
1
|
框架
|
智慧工厂沙盘框架模型
|
1
|
|
|
2
|
主控
|
Cortex-A9网关(板载WIFI/BT二合一模块、7寸电容式液晶触摸屏)
|
1
|
|
|
3
|
ZigBee协调器通讯模块
|
1
|
|
|
|
4
|
数据管理终端
|
1
|
|
|
|
5
|
无线路由器
|
1
|
|
|
|
6
|
原料
加工检验包装存储运输
|
立体库位
|
2
|
|
|
7
|
堆垛机
|
2
|
|
|
|
8
|
传送台
|
5
|
|
|
|
9
|
堆垛机智能控制器
|
2
|
|
|
|
10
|
雕刻机
|
1
|
|
|
|
11
|
雕刻机智能控制器
|
1
|
|
|
|
12
|
智能机器臂
|
3
|
|
|
|
13
|
传送带(含红外对射传感器和道闸)
|
4
|
|
|
|
14
|
残次品检测系统(含CCD摄像头、检测装置)
|
1
|
|
|
|
15
|
贴标机
|
1
|
|
|
|
16
|
二维码/RFID高频读卡装置
|
1
|
|
|
|
17
|
智能通讯节点
|
5
|
|
|
|
18
|
智能通讯设备(智能通讯节点+驱动板)
|
4
|
|
|
|
19
|
AGV小车
|
2
|
|
|
|
20
|
工厂环境监控
|
点阵大屏
|
1
|
|
|
21
|
通风扇
|
1
|
|
|
|
22
|
温湿度传感器
|
1
|
|
|
|
23
|
二氧化碳传感器
|
1
|
|
|
|
24
|
粉尘传感器
|
1
|
|
|
|
25
|
光照传感器
|
1
|
|
|
|
26
|
气压传感器
|
1
|
|
|
|
27
|
WiFi网络摄像头
|
1
|
|
|
|
28
|
照明灯
|
1
|
|
|
|
29
|
软件
|
ZigBee传感器无线传输综合软件
|
1
|
|
|
30
|
机器视觉残次品检测软件
|
1
|
|
|
|
31
|
生产线作业管理APP
|
1
|
|
|
|
32
|
生产线Web可视化监控平台
|
1
|
|
|
|
33
|
其他
|
附件(电源、线缆、插排等)
|
1批
|
|
五、技术参数
|
名称
|
参数要求
|
数量
|
|
智慧工厂应用实训系统
|
一、整体要求
要求包含原料立体仓库、加工雕刻、机器视觉分拣、贴标包装、成品立体仓库五个区;生产线作业管理APP、生产线可视化监控平台两个软件系统;ZigBee一种无线通信技术。
要求必须包含4行*6列立体仓库、堆垛机、机器视觉检测仪、多自由度机器臂、流水线传送带、AGV流转小车、加工雕刻机、贴标机、二维码识别器、光电传感器、环境传感器等工业制造装备。
要求每个工业制造设备都配备智能通讯节点,用于自动化控制和ZigBee组网传输。
要求能够通过C#上位机应用软件自由设置智能通讯节点的ZigBee信道、PANID、以及唯一识别编码。
要求配备本地数据中心管理终端、智能网关、机器视觉检测仪。
管理终端采用ubuntu16.04版本,包含web服务端、MQTT broker、数据库、以及Spring框架的生产可视化监控平台软件系统等。
网关采用Cortex-A9网关,Linux和Android双系统,可一键切换。运行Android生产线作业管理APP,管理工业制造设备,与加工流程自定义;通过MQTT协议、HTTP协议与数据中心管理终端进行信息交互。
采用python语言,人工智能图像处理算法对加工物品进行残次品检测,必须支持圆形和方形检测,同时支持MQTT通讯协议,接收检测命令反馈检测结果,可通过MQTT客户端软件工具进行测试验证。
沙盘尺寸不小于3.6m*2.5m*0.76m。
二、设备要求
1. 本地数据中心
1)Cortex-A9网关(1个)
核心板资源:
(1)CPU:Cortex-A9四核心的Samsung s5p4418,主频1.4GHz;
(2)GPU:MAIL-400,3D图形加速
(3)内存: 1GB DDR3;
(4)EMMC: 8GB;
(5)核心板+底板设计:核心板加装屏蔽罩,邮票孔方式与底板连接,抗干扰能力更强,比插针式更稳定可靠。要求引出核心板信号线,不少于188PIN。
底板资源:
(1)LCD接口:7寸IPS电容屏(16:9),分辨率1024×600;
(2)USB接口:2路USB_HOST 2.0输出,1路USB OTG;
(3)Ethernet接口:核心板内置千兆IP,外加不超过3RMB的PHY芯片即可,支持10/100/1000M,RJ45接口;
(4) 串口:2路3线RS232,1路TTL接口,1路RS485,1路Bluetooth;
(5)CAN总线接口:1路;
(6)RS485总线接口:1路;
(7)HDMI 接口:HDMI1.4a,最大支持1920*1080高清数字输出;
(8)LVDS液晶屏接口:单通道,最大支持1920*1080;
(9)摄像头接口:1路CMOS并行接口,最大支持800万像素;
(10)AV接口:1路模拟视频母口输入;
(11)外部存储扩展接口:SD卡、TF卡接口;
(12)音频接口: 1路MIC输入,1路1. 8w喇叭;
(13)按键:1个复位按键、1个休眠唤醒按键,2个音量键;
(14) 蓝牙WiFi:板载蓝牙WiFi二合一模块,WiFi符合IEEE802.11 b/g/n;蓝牙协议标准符合BT4.2;
(15)Mini PCIe接口:标准可插入4G通信模模块;
(16)24Pins应用扩展接口:用于处理器外设接口扩展功能,包含3路串口、1路PWM、1路IIC、1路ADC、8个GPIO,5V电源。
2)ZigBee协调器模块(1个)
采用CC2530单片机的射频通信与ZStack协议栈的方案,具备Zigbee建网、节点入网申请验证、路由信息维护、以及采集控制传输的功能。
板载PCB天线,通过TTL UART外设接口与A9网关 UART连接。
实时接收ZigBee传感器采样信息,并上报给上位机网关;同时接收网关下发的指令,通过ZigBee网络传输给对应的传感器节点。
供电电压:DC3.3V。
3)数据中心管理终端(1套)
包含主机、显示器、键盘、鼠标以及对应的软件系统。
采用Windows 7以上操作系统,虚拟机采用Ubuntu16.04操作系统版本,运行Web服务端程序、MQTT Broker、mysql5.5以上数据库、以及SpringMVC+MyBatis框架的生产可视化监控平台软件系统。
CPU主频:不低于2.8GHz;
内存容量:不低于4GB(DDR3);
硬盘类型:不低于100G。
4)无线路由器(1个)
支持有线、无线连接,DHCP自动分配IP地址。
2.工业制造类设备
1)立体仓库(2套)
位于原料仓库区和成品仓库区。
框架结构采用20mm*20mm铝合金方管型材设计。
总体长宽高尺寸:1000mm*600mm*600。
库位数量:四行六列,共24个库位。
每个库位尺寸:宽*高=91mm*67mm。
2)立体仓库堆垛机(2套)
用于原料和成品立体仓库区货物的存取。
采用三轴直线丝杆滑台,滚珠丝杠直线滑台模组密封防尘;
具有x、y、z三个运动行程,行程尺寸:1000mm、400mm、300mm。
丝杆滑台采用3个闭环57规格步进电机驱动,机身长81mm;
转矩:2.3N,步距角:1.8度(二相),
出线方式:二相四根引出线,黑色A+,绿色A-;红色B+,蓝色B-。
采用3个步进电机驱动器驱动二相四线步进电机,电流4.2A;
可检测脉冲信号,支持3.3V、5V、24V;
细分数:6400细分;
供电电压:DC9V-24V。
具有x、y、z三个轴的金属探测器原点探测限位开关;
检测距离:3mm;
迟滞距离:小于10%检测距离
最小检测物:0.8*2mm
额定电压:DC10-30V。
出线方式:三线制,电源正、负、信号。
单元货物重量:1g-1000g;
提升速度:5m/min
定位精度:±5mm
供电电压:DC 24V。
3)传送台(5台)
使用直流电机驱动器,可正反转,实现托盘周转。
安装有红外对射式限位开关检测到托盘,电机停止转动。
供电电源:DC12V
4)立体仓库控制器(2套)
CPU: Cortex-M3内核处理器;
具有2相4线步进电机驱动接口;
可调试步进电机驱动器控制(宽电压,脉冲速度可调);
可扩展四路控制;
采用金属探测传感器实现库位检测;
通讯方式: ZigBee无线通讯;
供电电压:DC12V。
5)工业柔性机械手(3台)
可以实现伸缩、旋转、抓放等多自由度控制。
主要由机械臂、电控板、机械手组成。
机械臂主要由全铝合金机械臂,行星减速步进电机、AB相光电编码器、铝合金联轴器、轴承等组成。电机带有编码器,具有位置闭合控制,重复精度大大提高。可安装柔性机械手、吸盘机械手、手型机械手,根据应用场合选型。
机械臂负载能力:500g
机械臂重量:3.14Kg
采用3个步进电机驱动机械臂三个轴,每个步进电机二相四线。每个步进电机带有编码器输出。
编码器输出线:3线。
机械手采用MG996舵机控制机械手张开闭合。
手爪采用两面带齿结构,使手爪抓取物件更牢固稳当。
舵机出线:三线制,电源正、负、信号。
电控板采用Cortex-M3以上内核微控制器,4路LV8731V驱动模块驱动机械臂电机,板载OLED显示屏,支持串口控制、CAN控制、按键控制等方式。
手爪采用两面带齿结构,抓取物品更牢固,采用舵机控制。
额定电压:DC12V
额定电流:5A
6)激光雕刻机(1台)
采用激光雕刻机完成在原材料上雕刻不同图案。激光发生器在顶部有按键,可以开启或者关闭激光发送,在调试或者不需要雕刻时可以关闭激光发生器以防止出现意外。
采用两项四线42步进电机驱动,X轴采用两个步进电机,Y轴采用一个;
采用20MM*20MM铝合金型材及亚克力材料制作,具有质量轻,强度高;
采用Cortex-M3内核处理器;
内置圆形、方形等多种雕刻算法可通过命令或者按键直接雕刻;
激光雕刻采用内置风扇冷却;
步进电机驱动器驱动:TB6600 32细分 4.0A;
通信方式:ZigBee
机身尺寸:40CM*35CM*23CM;
雕刻尺寸:30CM*21CM;
激光功率 : 3.2W;
供电电压 : DC12V。
7)传送带(4套)
实现产品在加工、检验、包装环节的自动运输、自动停止功能。
输送带:绿色PVC,耐油、耐腐蚀、防静电;
机架:不锈钢、铝型材,高度可调;
托辊滚筒,支撑上方皮带,减少摩擦阻力,保证运输速度更快更平稳;
具有红外对射一对,物品传输至探测器中间,皮带自动停止;
具有道闸一个,阻挡物品。
采用减速直流电机控制传送带道闸,转速18转/分钟;
工作电压:DC12V。
采用红外漫反射光电开关检测传送带物品到位,型号:欧姆龙E3Z-D82;
具有灵敏度调节器,检测范围可调,动作转换开关可调,常开/常闭可调。
8)包装贴标机(1套)
由光纤检测器、行程开关、供纸盘、电机、收料桶组成;
可调节供纸盘,可根据实际需求调节松紧;
收料滚轮,自动收料;
光纤检测器,精度高,可手动调节能够检测不同长度标签;
二维码标签采用30MM圆形标签
电源:AC 220V 60W
配用气压:0.4MPa
贴标精度:± 1mm
机身尺寸:550x350x600MM
9)二维码读卡器(1套)
感应距离:3-15cm
读卡速度:<0.2秒
输出格式:韦根、RS485等
尺寸:86*86MM
工作电压:DC12V
10)LED点阵显示屏(1个)
设备信息:75 单色室内高亮LED;
红色8字LED点阵,滚动显示;
11)AI机器视觉检测仪(1套)
主要由夜视CMOS摄像头、AI主板、LCD显示屏组成。
采用python语言编程,OpenCV视觉库进行图像处理,识别视频范围内加工零件的形状是否合格;
采用MQTT消息发布订阅模式接收数据中心的检测请求,并反馈残次品信息。
工作电压:DC5V。
3.通讯类设备
1)智能通讯节点(5个)
功能:将有线的工业现场总线、I/O接口转换为无线通信方式,同时将现场传感器数据转换为无线通信数据,或将无线通信数据转换为现场总线数据,达到现场传感设备的远程实时监测与控制。
硬件:采用Cortex-M3微控制器,具有9组标准通信接口,5组RJ12电话线接口、4组RJ45以太网接口,包含RS232、RS485、CAN、IIC、SPI、4-20mA模拟量、I/O输入输出等多种有线信号,可通过扁平电话线、扁平网线直接与实际工业传感器或外设连接,进行传感器采集与执行器控制。
分别用于3个机械手、2个AGV小车的联网控制。
标配0.95寸显示屏,分辨率128*64;
无线通信方式:ZigBee;
工作电源:DC12V供电。
2)智能通讯设备(4套)
由智能通讯节点和采集驱动板组成,用于工业传感器、贴标机、路灯、传送带、LED点阵显示屏、非仓库区传送台、二维码读卡器的远程采集控制。
标配2.4寸显示屏,显示ID、组网状态、数据收发状态。
驱动板支持6路开关量输入、2继电器输出,6路电机输出,2路舵机输出,1路RS232总线,1路RS485总线,1路TTL串口,通过RJ12电话线接口、RJ45以太网接口和扁平网线与智能通讯节点连接。
4.运输类设备
1)AGV智能小车(2台)
组成:由磁导航传感器、高频RFID读卡器、核心控制板、直流减速电机、锂电池供电板、传送台以及ZigBee智能通信节点组成。
采用Cortex-M3内核处理器,实时处理磁导航传感器,驱动直流减速电机实现前进、后退、左转、右转行驶;控制RFID读卡器读取铺设在路面的RFID标签值,读卡停车;控制车载传送台正转、反转实现托盘流转;通过ZigBee模块与智能网关协调器组网传输,实现车辆位置信息的上传以及接收命令控制传送台转动。
5.工厂环境监测设备
1)空气温湿度传感器(1个)
温度范围:-20~65℃
湿度范围:0~100%RH
刷新时间:1s
输出信号:RS485
通讯协议:Modbus
供电电压:DC 12V。
2)二氧化碳传感器(1个)
测量范围:400~5000PPM
输出信号:RS485
通讯协议:Modbus
供电电压:DC 12V。
3)粉尘传感器(1个)
检测PM2.5、PM1.0、PM10等不同的颗粒物
输出信号:RS485
通讯协议:Modbus
供电电压:DC 12V。
4)光照传感器(1个)
测量范围:0~65535Lux
输出信号:RS485
通讯协议:Modbus
供电电压:DC 12V。
5)气压传感器(1个)
测量范围:0~120Kpa
输出信号:RS485
通讯协议:Modbus
供电电压:DC 12V。
6)通风扇(1个)
继电器输出控制。
供电电压:DC12V
7)路灯(若干)
继电器输出控制。
供电电压:DC12V
6.视频监控设备
1)WiFi网络摄像头(1台)
用于视频监控,通过控制云台上下左右移动,以观察智慧工厂内各个角落状况及抓拍。
通信方式:WiFi、以太网。
三、软件要求
详细配套软件资源包含如下:
1.ZigBee传感器组网综合应用程序(1套)
实现ZigBee网络的建立、节点的自动组网、节点休眠与唤醒、节点之间数据传输、传感器节点的采样与传输、以及执行节点的传输控制等功能。
符合IEEE802.15.4标准规范,频段范围2.045G~2.484G;
支持TI Z-Stack 2007协议栈;
支持多任务处理;支持星形、树型、网状三种网络拓扑结构;
支持Packet Sniffer抓包分析仪;
支持串口调试上位机软件Z-Tool;
支持IAR for EW8051集成开发环境;
支持第三方SmartRF Flash烧写工具;
同一个工程编译ZigBee网络所有节点程序,包括协调器、路由器和传感控制终端节点。
2. 机器视觉检测软件(1套)
采用Python语言,内嵌MQTT协议,接收网关发布的检测消息,调用OpenCV机器视觉库对视觉区域内的物品形状进行检测,同时发布检测结果。
开发环境:Pycharm
语言:Python。
3. 生产线作业网关管理APP(1套)
网关采用Android操作系统,运行“生产线作业管理APP”。网关与管理终端位于同一个局域网时,可与生产线可视化监控平台互联互通。
功能需求:
采用串口编程与ZigBee协调器进行数据交互,获取工业制造设备运行状态、以及发送控制命令。
采用MQTT协议获取监控平台工单,控制AGV小车按照原料、加工、检验、包装、成品的路线完成工业制造流程。根据小车到达位置信息,控制工业设备按照后台逻辑驱动控制器动作,并实时接收反馈,依次驱动下一个设备,实现加工环节的流畅运行。加工过程数据,通过Restful API接口反馈给监控平台。
要求软件具有语音提醒功能,如工单接收提醒、异常加工提醒、执行器未实时反馈信息的提醒等。
要求软件包含原料区、加工区、校验区、包装区、成品区以及系统设置六个功能模块。主界面能够显示网关连接监控平台的状态。
系统设置模块要具备AGV小车位置信息与卡号绑定的功能,传感器信息一键同步至服务器的功能,已添加设备手动调试、修改、删除的功能,机械手运动坐标调节的功能,环境类传感器联动策略功能,以及连接服务器的配置功能。
五个作业区都要具备工业设备执行逻辑顺序可编辑功能,可灵活添加传感器、工业设备,具备点选设备更换逻辑顺序、或删除等功能。
要求能够控制机械手伸缩、旋转、抓放,控制堆垛机运动,控制贴标机在物品上贴标签,控制车辆驶停,控制传送带启停等功能。
开发环境:Android Studio
语言:Android
通讯协议:MQTT协议、HTTP协议Restful API接口。
4. 生产线Web可视化监控平台(1套)
平台部署在管理终端中,管理终端采用windows7以上操作系统,虚拟机ubuntu16.04操作系统,部署web应用服务器、MQTT Broker、mysql数据库、以及运行生产线Web可视化监控平台。
可以在局域网内通过浏览器访问平台查看工业生产状况。
功能要求:
1)要求具有系统管理、库位管理、工单管理、设备管理、以及视频监控等功能模块;
2)要求平台主页具有沙盘实时动态视图,工单形状与数量信息,原料与成品库存信息,残次品统计饼状图,加工数量柱状图,环境实时采样数据。
3)要求主页具有一键操作的功能,包括一键下单,一键清空成品库,一键添加原料库。
3)要求可设置立体库位的层数、X坐标、Y坐标,以及库位占用情况。
4)要求可查看工单编号、工单数据、工单数量、以及生产状态。
5)要求可实现小车位置跟踪,查看工厂环境信息,加工信息可查。
6)要求能够添加摄像头,可在页面实时浏览工厂内情况。
参数要求:
1.平台前端采用最新的HTML5编程技术,使用Bootstrap作为前端UI框架,自带全局CSS设置,内嵌JQuery插件,使用echarts图表库,实现网页上各种动态图表;使用mqttJS作为消息即时传输等;满足了物联网项目多样化的前端显示效果。
2.后台主要采用了Spring容器、Spring MVC框架、MyBatis ORM框架集成,采用Maven构建项目管理,保证了项目运行的健壮性和稳定性。
4. 平台提供标准的Restful API接口,网关可通过调用接口实现网关信息、网关下传感器信息的同步,支持二次开发。
5.平台采用MQTT协议,标准的JSON数据包实现信息在网关、WEB之间传输。
6. 开发环境
开发环境:IDeaUL2016
开发语言:JAVA
通讯协议:MQTT协议、HTTP协议Restful API接口
四、课程资源
该实训系统主要提供工业设备的综合实训开发,案例不少于10个,如:
(1)AGV车辆运输系统实训开发:包含功能概述、系统组成、硬件电气连接说明、控制原理说明、AGV小车寻迹控制、Android网关软件流程处理、车辆远程控制、道路RFID标签远程读取、系统测试;
(2)立体仓库堆垛系统实训开发:包含功能概述、系统组成、硬件电气连接说明、控制原理说明、堆垛机仓储存取控制、Android网关软件流程处理、堆垛机远程控制、系统测试;
(3)工业多自由度机器臂系统实训开发:包含功能概述、系统组成、硬件电气连接说明、控制原理说明、多自由度控制、Android网关软件流程处理、机器臂远程控制、系统测试;
(4)流水线传输系统实训开发:包含功能概述、系统组成、硬件电气连接说明、控制原理说明、传送带到位检测与控制、Android网关软件处理、传输带远程控制、系统测试;
(5)激光雕刻系统实训开发:包含功能概述、系统组成、硬件电气连接说明、控制原理说明、激光雕刻机控制、Android网关软件处理、激光雕刻远程控制、系统测试;
(6)贴标机打包模拟系统实训开发:包含功能概述、系统组成、硬件电气连接说明、控制原理说明、Android网关软件处理、贴标机远程控制、系统测试;
(7)提供机器视觉实验案例不少于3个,如OpenCV环境搭建、形状识别、颜色识别等;
(8)提供二维码识别实验案例
(9)提供工业级RS485传感器远程采集与控制。
(10)提供工业互联网Web信息管理开发实训案例不少于5个,如SpringMVC+Mybatis环境搭建、工厂用户登录、工厂库存及订单查询、工件信息统计图展示、工厂环境实时监测等。
|
1套
|