


更多相关产品
- LGWL-JT02型 物联网智慧城市交通实训系统
- LGWL-GC01型 智慧工厂应用实训系统
- LGWL-CZ01型 开放式车载控制系统
- LGHL-01型 工业数据采集实训台
- LGHL-02型 工业互联网技术应用实训台
- LGHL-03型 工业互联网自动化控制实训平台
- LGHL-04型 工业互联能耗监控实训台
- LGWL-FT01型 物联网技术开发平台
- LGWL-ED01型 窄带物联网开发实验箱
- LGWL-BIS01型 感知层信息安全实验箱
- LGWL-JJ01型 物联网智能家居教学实训系统
- LGWL-JT01型 智能交通管理实训系统
- LGWL-JJ02型 网板型智能家居实训系统
- LGWL-MX06型 物联网教学科研平台
- LG-BCNY01型 智能农业实验系统
- LG-BCJT03型 智能交通实训系统
- LG-BCJJ04型 智能家居系统(智能家居套装)
- LG-BCJJ04A型 智能家居实训套装
- LG-BCJJ05型 智能家居实训系统(柜式)
- LG-BCWL02型 物联网综合应用实训系统
- LGWL-JJ03型 物联网智能家居实训系统
- LGWL-LJ01型 智能楼宇家居物联网考核平台
- LGWL-NY01型 物联网智慧农业综合实训系统
- LGWL-NY02型 物联网农业教学实训系统
- LGWL-NY03型 智能温室大棚实训系统
- LGWL-JT02型 物联网智能交通教学实训系统
- LGWL-WL01型 物联网智能物流仓储实训系统
- LGWL-A8型 物联网教研平台(物联网实验箱)
- LGWL-A9型 物联网教研平台(Cortex-A9版)
- LGWL-RFID01型 RFID物联网教研平台(RFID物联网实验箱)
- LGWL-A8Y型 移动互联网教学科研平台
- LGARM-A8型 ARM嵌入式教学科研平台
- LGWL-A8X型 移动互联网/物联网教学科研平台
- LGWL-RFID02型 RFID 物联网教学科研平台
- LGARM-A89型 物联网创意实训平台
- LGWL-IPv6B型 IPv6 物联网全功能实验箱
- LGWL-A9Y型 移动互联网/物联网教学科研平台
- LGWL-IPV6A型 IPV6无线传感器网络教学科研平台
- LGWL-ZB01型 ZigBee无线传感器网络教学科研平台
- LGWL-A8M型 无线传感网教研平台
LGWL-MSRS01型 物联网模块化教研机器人平台
一、产品简介

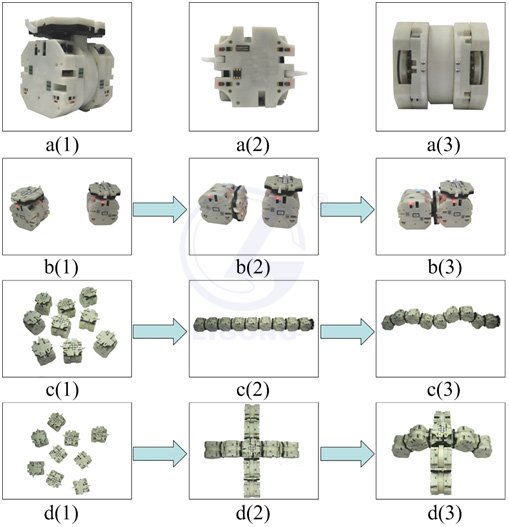
物联网模块化机器人教学科研平台,由一群模块化群体机器人组成。该模块机器人能够完成群体机器人的移动、协同、跟随等功能,并且可以实现ZigBee的组网,实现嵌入式无线通讯;同时多个模块之间通过自主对接,组装成运动能力丰富的关节机器人,可以实现蛇形,四足等各种关节机器人的运动。机器人内部集成ARM,AVR,CC2430等模块,可以用作嵌入式系统和智能物联网的研究实验,同时配合基于MSRS的机器人仿真软件,可有效开展机器人的仿真实验。平台融合了群体机器人、自组装和自变形机器人的多重优点,是一套功能丰富、配套完善且极具研究价值的实验平台。
 二、产品特点
二、产品特点
Swarmbot的控制系统由1个32位处理器STM32F103和4个8位的单片机ATMega8组成,ARM与单片机之间采用I2C总线通信而形成主从分布式控制系统。
完全开放的硬件接口,可以实现由顶层到底层的编程与实验。
ZigBee全局无线通信。采用TI公司的CC2430芯片,用于实现多个Swarmbot机器人之间的全局无线通信。
机器人内部集成ARM,AVR,CC2430等MCU构成嵌入式系统开发平台。具有电机驱动,位置检测,LED,按键,电流,检测、红外测距,光敏等一系列模块。可以广泛开展相应的实验研究和教学,并支持扩展。
多种层次的算法例程,可有效展开群体机器人、自组装机器人等群体组装和运动实验。
Swarmbot机器人融合了群体机器人,自组装机器人和自重构机器人等多重优势,可以有效开展相关技术的融合。
三、硬件资源

 六、机器人创意组装
六、机器人创意组装
 七、配置清单:
七、配置清单:
物联网模块化机器人教学科研平台,由一群模块化群体机器人组成。该模块机器人能够完成群体机器人的移动、协同、跟随等功能,并且可以实现ZigBee的组网,实现嵌入式无线通讯;同时多个模块之间通过自主对接,组装成运动能力丰富的关节机器人,可以实现蛇形,四足等各种关节机器人的运动。机器人内部集成ARM,AVR,CC2430等模块,可以用作嵌入式系统和智能物联网的研究实验,同时配合基于MSRS的机器人仿真软件,可有效开展机器人的仿真实验。平台融合了群体机器人、自组装和自变形机器人的多重优点,是一套功能丰富、配套完善且极具研究价值的实验平台。
Swarmbot的控制系统由1个32位处理器STM32F103和4个8位的单片机ATMega8组成,ARM与单片机之间采用I2C总线通信而形成主从分布式控制系统。
完全开放的硬件接口,可以实现由顶层到底层的编程与实验。
ZigBee全局无线通信。采用TI公司的CC2430芯片,用于实现多个Swarmbot机器人之间的全局无线通信。
机器人内部集成ARM,AVR,CC2430等MCU构成嵌入式系统开发平台。具有电机驱动,位置检测,LED,按键,电流,检测、红外测距,光敏等一系列模块。可以广泛开展相应的实验研究和教学,并支持扩展。
多种层次的算法例程,可有效展开群体机器人、自组装机器人等群体组装和运动实验。
Swarmbot机器人融合了群体机器人,自组装机器人和自重构机器人等多重优势,可以有效开展相关技术的融合。
三、硬件资源
| 类别 | 配置 |
| 处理器 | STM32F103CBT6,32位标准RISC处理器 |
| Atmega8L,8位AVR RISC结构单片机 | |
| 接口 | 2个I2C接口(SMBus/PMBus) |
| 3个USART接口 | |
| 2个SPI同步串行接口(18兆位/秒) | |
| CAN接口(2.0B 主动) | |
| USB 2.0全速接口 | |
| 串行线调试(SWD)和JTAG接口 | |
| 无线通讯模块 | ZigBee CC2430 |
| 驱动与传感器 | 近距离红外传感器: 12对 1~150mm |
| 远距离红外传感器: 4对 0~250mm | |
| ADXRS613陀螺仪(Yaw rate): 150°/s |
四、软件资源
| 类别 | 软件资源 |
| 开发环境 | 嵌入式集成开发环境IAR EWARM |
| 单片机系统 | ATmega8L单片机系统的学习与实验 |
| 嵌入式ARM系统 |
STM32处理器的GPIO、中断、定时操作及AD转换 GPIO的结构特性、寄存器配置及其示例 嵌套式中断控制器(NVIC)简介、外部中断/事件,(EXTI)控制原理及相关的寄存器说明 STM32通用定时器的PWM输出控制 STM32 A/D编程 |
| ZigBee无线通讯 | ZigBee协议学习、开发与组网 |
| 群体机器人 |
移动机器人的寻线跟踪、探测、定位导航和自主避障等实验 群体机器人的跟随、编队、协作和自组装等实验 多关节机器人的步态实验 |
| 仿真环境 |
基于微软推出的机器人开发平台 Microsoft Robotic Studio(MSRS) 能够监控状态和与单个组件进行交互 能够发现、创建、停止和重新启动组件 能够处理从多个传感器来的并发输入,并将这些并发输入变 成互不干扰的消息队列 能够处理自治系统,也能够在本地或者通过网络控制机器人 提供的运行时是轻量级的并能够运行在不同的环境中 其可扩展性和灵活性可以适应多种不同的硬件和软件 |
五、机器人自组装流程
| 序号 | 名称 | 单位 | 数量 | 备注 |
| 1 | 机器人节点 | 个 | 6 | |
| 2 | 电源适配器(DC 8.4V1.2A) | 块 | 1 | |
| 3 | 编程下载调试板 | 块 | 1 | 带配线 |
| 4 | J-Link仿真器 | 套 | 1 | 带配线 |
| 5 | ZigBee Debugger仿真器 | 套 | 1 | 带配线 |
| 6 | 配套光盘 | 张 | 1 | |
| 7 | 产品说明书 | 本 | 1 | 电子版 |