


更多相关产品
- LGWL-JT02型 物联网智慧城市交通实训系统
- LGWL-GC01型 智慧工厂应用实训系统
- LGWL-CZ01型 开放式车载控制系统
- LGHL-01型 工业数据采集实训台
- LGHL-02型 工业互联网技术应用实训台
- LGHL-03型 工业互联网自动化控制实训平台
- LGHL-04型 工业互联能耗监控实训台
- LGWL-FT01型 物联网技术开发平台
- LGWL-ED01型 窄带物联网开发实验箱
- LGWL-BIS01型 感知层信息安全实验箱
- LGWL-JJ01型 物联网智能家居教学实训系统
- LGWL-JT01型 智能交通管理实训系统
- LGWL-JJ02型 网板型智能家居实训系统
- LGWL-MX06型 物联网教学科研平台
- LG-BCNY01型 智能农业实验系统
- LG-BCJT03型 智能交通实训系统
- LG-BCJJ04型 智能家居系统(智能家居套装)
- LG-BCJJ04A型 智能家居实训套装
- LG-BCJJ05型 智能家居实训系统(柜式)
- LG-BCWL02型 物联网综合应用实训系统
- LGWL-JJ03型 物联网智能家居实训系统
- LGWL-LJ01型 智能楼宇家居物联网考核平台
- LGWL-NY01型 物联网智慧农业综合实训系统
- LGWL-NY02型 物联网农业教学实训系统
- LGWL-NY03型 智能温室大棚实训系统
- LGWL-JT02型 物联网智能交通教学实训系统
- LGWL-WL01型 物联网智能物流仓储实训系统
- LGWL-A8型 物联网教研平台(物联网实验箱)
- LGWL-A9型 物联网教研平台(Cortex-A9版)
- LGWL-RFID01型 RFID物联网教研平台(RFID物联网实验箱)
- LGWL-A8Y型 移动互联网教学科研平台
- LGARM-A8型 ARM嵌入式教学科研平台
- LGWL-A8X型 移动互联网/物联网教学科研平台
- LGWL-RFID02型 RFID 物联网教学科研平台
- LGARM-A89型 物联网创意实训平台
- LGWL-IPv6B型 IPv6 物联网全功能实验箱
- LGWL-A9Y型 移动互联网/物联网教学科研平台
- LGWL-IPV6A型 IPV6无线传感器网络教学科研平台
- LGWL-ZB01型 ZigBee无线传感器网络教学科研平台
- LGWL-A8M型 无线传感网教研平台
LGWL-STM01型 物联网移动机器人教研平台
一、产品简介
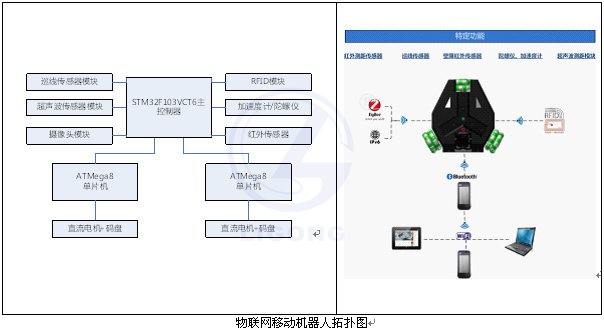
 物联网移动机器人教研平台,是一款基于STM32方案推出的功能全面、性能卓越的物联网智能移动平台,能够自主运行、自主规划,支持手机控制平台运动,集成了陀螺仪、巡线传感器8路、6个红外避障传感器、超横波测距模块、RFID等多种传感器,支持3G(智能手机)、WiFi、Bluetooth和Zigbee无线网络以及RFID等通信方式,是一款性能稳定且功能强大的物联网移动平台。
物联网移动机器人教研平台,是一款基于STM32方案推出的功能全面、性能卓越的物联网智能移动平台,能够自主运行、自主规划,支持手机控制平台运动,集成了陀螺仪、巡线传感器8路、6个红外避障传感器、超横波测距模块、RFID等多种传感器,支持3G(智能手机)、WiFi、Bluetooth和Zigbee无线网络以及RFID等通信方式,是一款性能稳定且功能强大的物联网移动平台。
机器人拓扑结构:
 二、产品特点
二、产品特点
第一章 手机控制机器人全向移动
第二章 高效的头像识别技术应用,摄像头角度(45~135°)连续可调
第三章 集成了RFID、IPV6/Zigbee、蓝牙等多种通信模块,方便扩展不同的组网方式
第四章 集成了光电、红外等多种传感器,可以通过编程实现不同的功能
第五章 即可用来开展MWSN的教学与科研,又可以用于机械自动化控制领域的教学与科研
三、平台功能
第六章 手机遥控机器人运动
通过手机应用程序上的方向键控制机器人运动。
第七章 自动跟随人物
基于手机视频采集,通过harr训练器检测人体上半身的正面、侧面和背面,计算出人体的 大小和中心位置,并控制机器人自动跟踪人物。
第八章 远程视频采集,摄像头角度调节
远程计算机或者网络终端通过WIFI网络获取手机摄像头
采集的图像信息,并遥控摄像头角度在45-135°范围内
变化。
第九章 巡线运动
机器人通过前方的巡线传感器,在白色反光地面沿着黑色
任意曲线前进,以实现沿直线、圆弧等循迹功能。
第十章 近距离红外测距功能
位于机器人正面下方的夏普测距红外传感器可以检测距离在1-30cm范围内的物体。
第十一章 RFID定位功能
车(机器人)载RFID读卡器读取环境中的RFID路标信息,根据路标的ID进行定位。
第十二章 环境建图功能
机器人在静止情况下,超声波测距模块每次旋转一定角度(如5°)并采集一次环境深度 信息,旋转一周后完成二唯环境建图。
四、硬件资源
机器人拓扑结构:
第一章 手机控制机器人全向移动
第二章 高效的头像识别技术应用,摄像头角度(45~135°)连续可调
第三章 集成了RFID、IPV6/Zigbee、蓝牙等多种通信模块,方便扩展不同的组网方式
第四章 集成了光电、红外等多种传感器,可以通过编程实现不同的功能
第五章 即可用来开展MWSN的教学与科研,又可以用于机械自动化控制领域的教学与科研
三、平台功能
第六章 手机遥控机器人运动
通过手机应用程序上的方向键控制机器人运动。
第七章 自动跟随人物
基于手机视频采集,通过harr训练器检测人体上半身的正面、侧面和背面,计算出人体的 大小和中心位置,并控制机器人自动跟踪人物。
第八章 远程视频采集,摄像头角度调节
远程计算机或者网络终端通过WIFI网络获取手机摄像头
采集的图像信息,并遥控摄像头角度在45-135°范围内
变化。
第九章 巡线运动
机器人通过前方的巡线传感器,在白色反光地面沿着黑色
任意曲线前进,以实现沿直线、圆弧等循迹功能。
第十章 近距离红外测距功能
位于机器人正面下方的夏普测距红外传感器可以检测距离在1-30cm范围内的物体。
第十一章 RFID定位功能
车(机器人)载RFID读卡器读取环境中的RFID路标信息,根据路标的ID进行定位。
第十二章 环境建图功能
机器人在静止情况下,超声波测距模块每次旋转一定角度(如5°)并采集一次环境深度 信息,旋转一周后完成二唯环境建图。
四、硬件资源
| 类别 | 配置 | |
| 机器人本体 | 主控制器 | STM32F103VCT6 |
| 单片机 | ATMega128 * 8 | |
| 底盘 | 3轮全向底盘,移动速度5m/s | |
| 电池 | 12V锂电池,4300mAh | |
| 通信模块 | 蓝牙模块 | HC-02 |
| RFID模块 | 6-8cm,14443A | |
| Zigbee/IPv6模块 | STM32W | |
| 扩展通信接口 | USB | |
| USART | ||
| 传感器模块 | 红外测距传感器 | 1-30cm |
| 巡线传感器 | 双排8路 | |
| 避障红外传感器 | 6个 | |
| 超声波测距模块 | 1-400cm | |
| 陀螺仪 | ADXRS613 | |
| 加速度计 | ADXL335 | |
| 选配 | 手机客户端与服务端 | 安卓智能手机1GHz主频双核,512MB内存 |
| 超声波测距模块 | 范围1-400cm | |
| 手抓机构 | ---- | |
五、软件资源
| 类别 | 软件资源 |
| STM32F103VCT6主控制器 | uC/OS-Ⅱ操作系统 |
| IAR开发环境 | |
| STM32F103VCT6应用软件 | |
| ATMega128单片机 | ATMega128应用软件 |
| IAR开发环境 | |
| 通讯模块 | Contiki操作系统 |
| IPv6通信协议&ZigBee通信协议 | |
| Andriod手机软件 | 无线线视频传输与监控 |
| 机器人行为控制软件包 | |
| 手机视频处理软件 |
六、部分实验目录清单
| 分类 | 实验内容 |
| 基础应用实验 | 机器人程序下载仿真实验 |
| 机器人程序更新实验 | |
| 手机程序更新实验 | |
| 通信实验 | 修改蓝牙名字实验 |
| 基于WIFI远程视频采集实验 | |
| 手机控制移动平台实验 | |
| RFID定位实验 | |
| 头像识别算法应用实验 | |
| 人物跟随实验 | |
| 传感器实验 | 巡线运动 |
| 红外测距实验 | |
| 环境建图实验 |
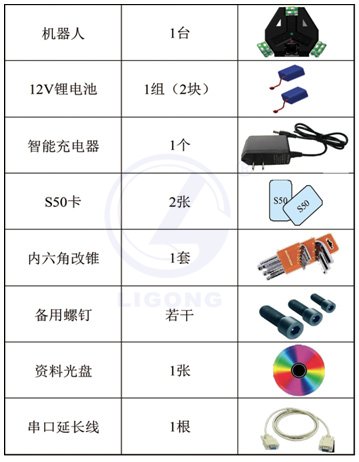
七、产品配件