


- LG-IRBL01型并联机器人分拣工作站
- LGWD-05型五自由度机器人实训平台
- LGJ-ZG01型微工厂智能制造集成培训装置
- LGJS-03型模块式环形柔性自动生产线实训系统
- LGH-DQ01型工业机器人自动化综合实训平台
- LG-GZS05型工业机器人罐装生产流水线实训系统
- LGJ-DQ01型工业机器人电气调试实训装置
- LG-IRZ01型工业机器人应用工作站
- LGL-CZ06型工业机器人机械拆装及电气拆装平台
- LG-IRW01A型工业机器人故障诊断与维护平台
- LGH-IRW03型工业机器人装调应用与维护实训平台
- LG-RCZ04型工业机器人维护维修实训工作站
- LG-IRW01型工业机器人故障诊断实训平台
- LG-RCZ02型工业机器人拆装综合实训系统
- LG-RMD05型工业机器人码垛工作站
- LG-CNW01型工业机器人上下料数控车床实训平台
- LGL-DM06型工业机器人打磨去毛刺实操工作站
- LGL-DM06型工业机器人打磨去毛刺实操工作站
- LGJ-DM01型工业机器人打磨工作站
- LGL-MD06型工业机器人码垛实操工作站
- LGL-PT06型工业机器人喷涂实操工作站
- LGL-HJ06型工业机器人焊接实操工作站
- LG-IRH01型机器人焊接工作站实训平台
- LG-IRBL02型并联机器人视觉分拣工作站
- LGCO-BOT01型协作机器人技术及应用综合实训平台
- LGJ-ZH02型工业机器人组合式应用实训装置
- LG-GJQS1型工业机器人与智能视觉系统应用实训平台
- LG-GJQS2A型工业机器人与智能视觉系统应用实训平台
- LGY-PCB01型工业机器人PCB异形插件工作站
- LGY-CX01型FMS工业机器人智能制造实训平台
- LG-IRF03型机器人RFID分拣实训系统
- LG-IRF01型机器人光机电一体化分拣实训系统
- LG-X102型工业机器人操作与运维工作站
- LGX-B03型工业机器人运用与维护实训平台
- LG-IRB03型工业机器人实训平台(IRB120机器人)
- LGHL-01A型工业物联网技术应用实训台
- LG-RCZ02型工业机器人拆装实训工作站
- LGY-CX01型机器人机床上下料实操工作站
- LGL-HJ06型工业机器人焊接实操工作站
- LG-RMD05型工业机器人码垛实操工作站
LGWD-05型五自由度机器人实训平台
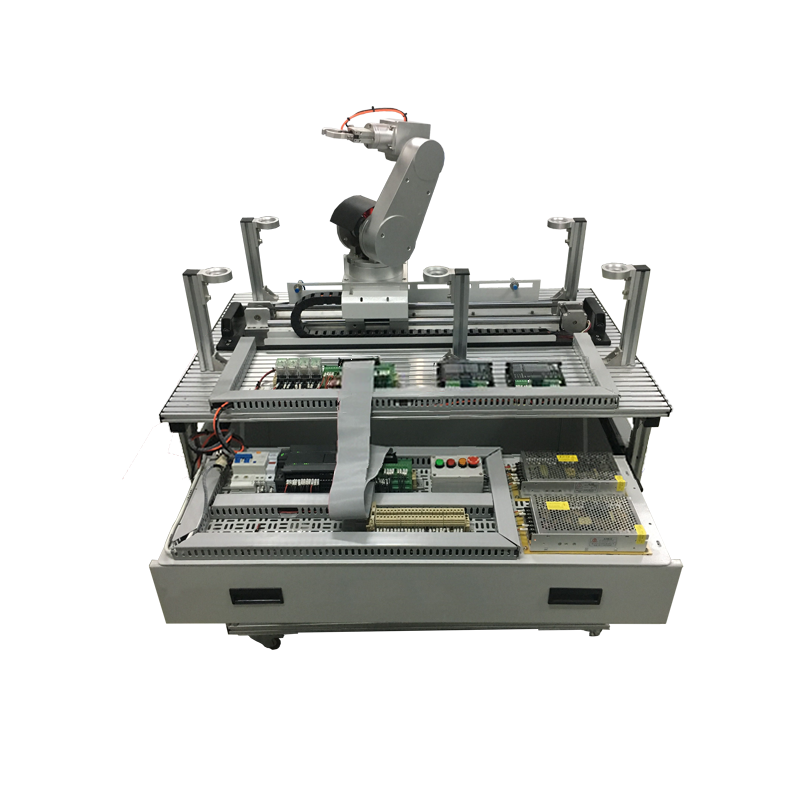
一、概述
LGWD-05型 五自由度机器人实训平台由型材实训桌、五自由度机器人、机器人控制器、步进电机及驱动器和电气控制部分组成。通过PLC、机器人控制器对五自由度机器人进行控制,实现机器人在行程范围内任一位置物体的抓取、移动、存放功能。适合自动检测技术、信号连接及转换技术、电机驱动技术、机械手技术、机器人技术、运动控制技术、传感器检测技术、位置检测技术、电气及PLC控制技术、可编程控制器及其应用等。
二、产品特点
1. 机构采用关节式结构,按工业标准要求设计,速度快、柔性好
2. 模块化结构,简单、紧凑,完全满足实验的要求
3. 配备了高性能控制器,专用电机驱动模块,使其变得更加快速/高精度化,I/O处理、程序处理速度更快
4. 提高了与可编程控制器、通用电机驱动模块的协调性,提高生产性能,可适合于各种用途
5. 采用大刚度手臂(铝合金材质)、动态增益控制,实现高精度动作
6. 提供通用语言编程系统,二次开发方便、快捷,适于教学实验
三、技术参数
1. 输入电源:单相三线AC220V±10% 50Hz
2. 工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
3. 装置容量:<0.5kVA
4. 外形尺寸:1000mm×640mm×1400mm
5. 技术规格:
(1)自由度:5自由度;
(2)安装方式:台面,基座安装;步进伺服混合驱动,最大可搬运的重量 1kg;
(3)动作范围J1度、水平移动,最高速度: J1 mm/S 300,最大合成速度 mm/sec 1500,重复定位精度 mm ±0.5,周围环境温度 度 0~40,臂可达到范围半径 mm ≥400 ,本体重量 kg ≤30
四、装置组成
实训系统由型材实训桌、五自由度机器人及电气控制三部分组成。五自由度机器人运动机械部分包括底座水平移动、底座旋转、大臂上下摆动、小臂上下摆动、手爪旋转,用于实现定位功能,手爪夹紧与松开,采用电动手爪,伺服电机驱动,齿轮传动,开闭角度自由控制,可对直径60mm以内的任意物体进行抓取,具有力矩保持、速度可调等特点。桌面设有六个工位台,在教学过程中可根据考核要求,调节工作台位置点。
电气控制部分包含漏电保护器、PLC、机器人控制器、步进电机及驱动器、空心杯电机、直流减速电机、蜗轮蜗杆、伺服电机、光电编码器、电感传感器、霍尔传感器、开关电源、操作盒(黄、绿、红及急停控制按钮)等组成),通过传感器信号采集,PLC编程对五自由度机器人进行位置控制、时序逻辑控制,实现对机器人在工作台面范围内物体抓取、移、放的功能。