


更多相关产品
- LGZN-SZ02L型智能制造数字孪生虚拟仿真实训室
- LGGY-DS23型大田耕种机器人实训装置
- LGGY-DS22型物理除草机器人实训装置
- LGGY-DS21型大田作业机器人实训装置
- LGGY-DS20型果园喷雾机器人实训装置
- LGGY-DS19型果园采摘机器人实训装置
- LGGY-DS18型果园应用开发通用平台实训装置
- LGGY-DS17型智能割草机器人实训装置
- LGGY-DS16型双臂复合机器人实训装置
- LGGY-DS15型七自由度机械臂实训装置
- LGGY-DS14型六自由度机械臂套件实训装置
- LGGY-DS13型具身复合机器人创新设计套装实训装置(增强版)
- LGGY-DS12型便携式ROS导航机器人学习平台实训装置
- LGGY-DS11型基于大模型的智慧零售平台实训装置
- LGGY-DS10型农业智能车实训装置
- LGGY-DS09型智能服务机器人实训装置
- LGGY-DS08型ROS基础教学智能车实训装置
- LGGY-DS07型视觉语音智能车实训装置
- LGGY-DS06型人形机器人实训装置
- LGGY-DS05型6足18自由度圆形仿生机器人实训装置
- LGGY-DS04型无人驾驶深度学习智能车实训装置
- LGGY-DS03型商服机器人-机械臂版及场地实训装置
- LGGY-DS02型计算机视觉平台实训装置
- LGGY-DS01型智能汽车及赛道实训装置
- LGGY-Z08型智能制造综合产线
- LGGY-SJ03型机器人视觉分拣螺母工作站实训系统
- LGGY-WH05型工业机器人维护维修基础教学工作站
- LGGY-F6A型服务机器人应用技术实训平台
- LGGY-K50型工业机器人应用工作站
- LGGY-R04型工业机器人一体化实训平台
- LGGY-R02B型智能生产线运行与维护综合实训装置
- LGGY-T03A型智能制造单元系统集成应用平台
- LGGY-W01A型工业机器人应用工作站
- LGGY-S2型工业机器人与智能视觉系统应用实验平台
- LG-MPS02型模块化柔性自动化生产线实训系统(八站)
- LGJ-IMS03型工业机器人模块化智能生产线实训系统
- LGJ-KY02型智能机器人智能制造综合实操工作站
- LGJ-QBJ01型工业机器人模拟汽车领金冲压集成制造实训系统
- LGJ-CNC02型工业机器人智能生产流水线实训平台
- LGJ-ZH03型工业机器人组合式应用实训装置
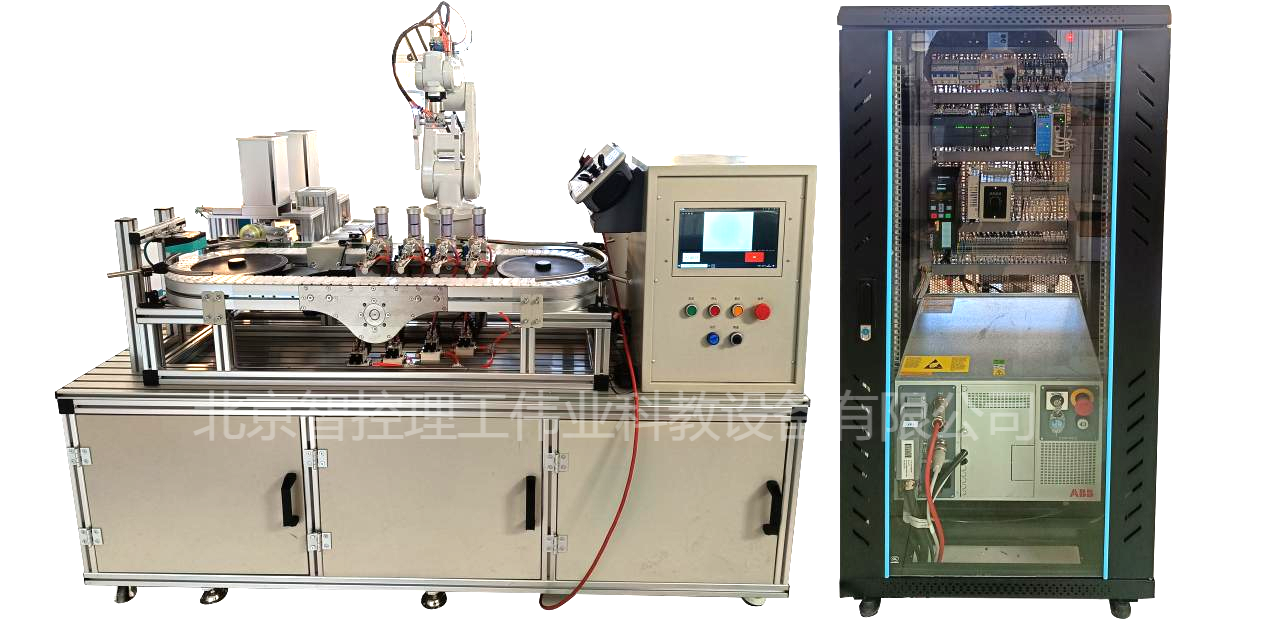
LGGY-S2型工业机器人与智能视觉系统应用实验平台
一、系统与组成
平台至少由六自由度工业机器人系统、智能视觉检测系统、可编程控制器(PLC)系统、RFID数据传输系统、工具换装单元、四工位供料单元、环形输送单元、直线输送单元、工件组装单元、立体仓库单元、废品回收框、各类工件、电气控制柜、型材实验桌、型材电脑桌等组成,实现对高速传输的工件进行分拣、检测、搬运、装配、存储等操作。
二、技术参数
1、输入电源:三相四线AC380V±10% 50Hz
2、设备实验平台尺寸(长宽高):2000mm×1200mm×1500mm
3、设备控制柜尺寸(长宽高):600mm×600mm×1400mm
三、配置及参数
(一)工业机器人技术指标
1.埃夫特E3-600机器人本体

(1)串联6关节且本体防护等级不小于IP40;
(2)重复定位精度:≤±0.02mm;
(3)工作半径:不小于590mm;
(4)有效荷重:不小于3 kg;
(5)集成信号源与气源:手腕设不少于10路信号及不少于4路空气(5 bar);
(6)各轴运动范围//速度:J1轴 ±170°/400°/sec;J2轴 +85°/-135°/300°/sec;J3轴+185°/-65°//520°/sec;J4轴±190°//500°/sec;J5轴±130°//530°/sec;J6轴±360°/840°/sec;
2.机器人控制系统
(1)控制系统具有8路数字量输入(3个捕捉功能)PNP,24VDC光电耦合;8路数字量光电耦合输出(每一路最大输出电流为0.5A)PNP,24VDC;1路增量式编码器输入;
(2)控制系统支持最多32轴插补,通过现场总线CANOPEN或者ETHERCAT进行驱动;
(3)通信模块扩展:不少于2个通信模块,支持I/O等模块扩展;
(4)通信端口类型:不少于2个以太网,支持Modbus/TCP,Profibus DP(从站)。
(二)智能视觉检测系统
智能视觉检测系统由视觉控制器、视觉相机及监视显示器等组成,可随机器人移动(视觉工装),用于检测工件的特性,如数字、颜色、形状等,还可以对装配效果进行实时检测操作。智能视觉检测系统通过I/O电缆连接到PLC或机器人控制器,也支持串行总线和以太网总线连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
1、控制器主要规格要求:
(1)动作模式:支持标准模式,倍速多通道输入、不间断调整;
(2)支持并列处理;
(3)单台控制器最多可连接2台相机
(4)场景数:128
(5)UI操作:支持鼠标
(6)设定方法:利用流程编辑功能制作处理流程
2、相机参数要求:
(1)摄像元件所有像素读出方式、行间传输型、CCD摄像元件(相当于1/3英寸)
(2)彩色/黑白:彩色
(3)有效像素数:640(H)×480(V)
(3)摄像面积 H×V(对角):4.8×3.6(6.0mm)
(4)像素尺寸:7.4(μm)×7.4(μm)
(5)快门功能:电子快门方式可在20μs~100ms的范围内设定快门速度
3、视觉软件功能要求:
(1)真彩处理可将像素间的色差准确地换算成色差值导出。该值将作为RGB三维空间上的距离差被感知,即便是微小的色差也能准确检测到。因此,即使对比度较低,也能可靠地检测到划痕及污迹等。
(2)可使用传送带全景画显示工具,轻松确认最佳的测量触发输入间隔。可预防工件的漏检测。
(3)以图像传感器测量基础为结果,模拟机械东西。
(三)RFID数据传输系统
1、RFID检测系统,安装在环线输送单元的左端圆弧处,电子标签已埋在工件内部。当工件从环线输送单元经过左端圆弧处时,RFID检测系统可以准确地读取工件内的标签信息,如编号、颜色、高度等信息,该信息通过工业现场数据总线传输给PLC,用来实现工件的分拣操作。
2、工作频率要求:13.56MHz;
3、无线协议:ISO-15693;
4、读写距离要求:0-150mm;
5、通信方式:以太网;
6、供电方式:POE供电。
(四)可编程控制器单元
配备西门子S7-1200系列可编程控制器、数字量扩展模块,用于读写RFID系统的工件数据,控制机器人、电机、气缸等执行机构动作,处理各单元检测信号,管理工作流程、数据传输等任务。PLC主机:CPU 1214C,数字量输入模块:SM1221,模拟量输出模块:SM1222
(五)工具换装单元
1、由大口气夹、真空发生器、吸盘工装、视觉工装、定位工装、工装支架等机构组成。大口气夹、真空发生器安装机器人本体上,受机器人控制,大口气夹不仅可以夹取工件,还可以夹取三种工装进行功能性操作。大口气夹一侧前端装有光纤传感器,用于检测前方有无物体,另一侧装有气动对接装置,用于将气动信号自动导入到气动工装(吸盘工装)上。工装支架安装在型材实验桌上,用于机器人自动放置和取用不同的工装。
2、提供多种工装:吸盘、视觉、定位等。
3、吸盘工装上装有真空吸盘和气动对接装置,当大口气夹夹取吸盘工装时,真空吸盘的动作由机器人控制,可以随之移动,吸取任意可到达位置内的工件。
4、视觉工装上装有视觉相机,当机器人夹取视觉工装时,视觉相机可以随着机器人的移动拍摄不同位置、不同方向的工件或场景。
5、定位工装上设有定位针,用于精确定位工件的位置。
(六)四工位供料单元
由井式料库、推料气缸、顶料气缸和光电传感器组成,安装在型材实验桌上,用于将工件库中的工件依次推出到环形输送线。提供不同编号、不同高度、不同颜色的标准工件,以及编号缺少笔画、杂色叠加等不合格工件。四工位的供料设计,使得供料方式多样化,可以进行单一的上料,也可以进行不同编号、高度、颜色的组合上料,以及对上料速度快慢控制,实现上料形式的多样化。
(七)环形输送单元
包含一套交流调速系统,由变频器、三相交流电机、环形板链(传送带)、对射传感器等组成,安装在型材实验桌上,用于传输工件。要求环形输送单元包含一套,交流调速系统,由V20 0.55KW变频器、三相交流电机、环形板链(传送带)、对射传感器等组成,安装在型材实训桌上,用于传输工件.
(八)直线输送单元
包含一套直流调速系统,由直流电机、高精度编码器、调速控制器、同步带轮等组成,安装在型材实验桌上,用于传输工件。
(九)工件组装单元
由工件盒送料机构及工件盖送料机构组成,安装在型材实验桌上,用于装配工件。具有3个工件盒组装位置,能同时对3个工件盒进行装配操作。工件盒内设有4个工件槽用于放置工件,工件盒和工件盖四个角带有磁性粘合,可以使工件盒与工件盖紧密组合在一起。设有多个传感器,可以检测工件盒/工件盖的有无、方向是否装反。机器人可以进行工件盒/工件盖装反时的修正、工件按序装配、工件拆解等操作。通过对工件盒/工件盖的正反放置,工件装配的顺序变化,提高机器人的应用灵活性,可进行机器人不同难易程度的应用考察,实现实验及考核的多样化。
(十)立体仓库单元
由铝质材料加工而成,配有9个仓位(3×3),安装在型材实验桌上,用于放置装配完的组件,也可以通过机器人对装配完成的组件进行拆装,并分类放置到相应的工件料库。
(十一)废品回收框
安装在型材实验桌左后侧,用于机器人自动放置被检测出来的无用工件或不合格品。
(十二)电气控制柜
用于安装机器人控制器、PLC、变频器及调速控制器等电气部件,采用网孔板的结构,便于拆装。通过两根电缆线与型材实验桌相连,两端使用航空插头,强弱电分离,连接安全可靠。
(十三)以太网路由器
以太网路由器将PLC、机器人控制器、智能视觉控制器组成一个以太网局域网,进行数据的相互传输,实现工业现场控制系统的高层次应用,同时可以培养和考核学生对工业网络的使用技能。
(十四)云智能实验室安全管理系统
系统由主电路、控制电路、检测保护电路、显示电路、云平台数据收发器、云平台智能管理网站、云组态软件、大数据云平台记录等组成,实现无线传输、信息处理等物联网技术应用于自动化远程控制。设备端运行状态、数据参数等上传至云平台。
四、配套软件课件
(一)西门子博图V17 PLC编程软件一套。
(二)电气控制技能实训仿真软件
(三)PLC控制编程仿真软件
(四)工业自动化控制实训系统
(五)教学课件资源
1、PLC编程教学课件资源
2、电气控制技能实训仿真软件
3、电气教学课件资源
五、配置清单
|
序号
|
名 称
|
主要部件、器件及规格
|
数量
|
备注
|
|
1
|
电气实训柜
|
600mm×600mm×1500mm
|
1台
|
|
|
2
|
实训平台
|
2000mm×1200mm×1400mm
|
1台
|
|
|
3
|
工业机器人
|
E3-600机器人、控制器、示教器
|
1台
|
埃夫特
|
|
4
|
智能视觉系统
|
工业相机 MV-CS016-10GC
|
1台
|
海康
|
|
工业镜头MVL-HF1228M-6MPE
|
1台
|
|||
|
视觉光源MV-LCDS-50-50-W
|
1台
|
|||
|
视觉软件IMVS-VM-6100-PR0
|
1套
|
|||
|
电缆MV-ACC-01-1102-3m
|
1台
|
|||
|
监视显示器
|
1台
|
|||
|
5
|
RFID系统
|
读写器:DW207
|
1套
|
|
|
电子标签
|
36个
|
|||
|
6
|
可编程控制器系统
|
CPU 1214C DC/DC/DC
|
1只
|
西门子
|
|
数字量输入模块:SM1221
|
1只
|
|||
|
模拟量输出模块:SM1222
|
1只
|
|||
|
7
|
交流调速系统
|
变频器:V20 0.55
|
1套
|
|
|
交流减速电机:01K3GN-D/0GN50K
|
||||
|
8
|
直流调速系统
|
PID调节控制器:24/20BL-4Q02
|
1套
|
|
|
直流电机:DM-06-2GN-24
|
||||
|
编码器:增量式2000线
|
||||
|
10
|
路由器
|
4P以太网路由器
|
1台
|
|
|
11
|
实训模块
|
四工位供料单元、环形输送单元、直线输送单元、工件组装单元、工具换装单元、立体仓库单元等
|
1套
|
|
|
12
|
气泵
|
静音气泵
|
1台
|
|
六、实训项目
项目一 PLC程序编程与调试
项目二 工业机器人示教单元使用
项目三 工业机器人软件使用
项目四 工业机器人基本指令操作
项目五 工业机器人工件的跟踪抓取
项目六 射频识别(RFID)技术应用
项目七 使用RFID软件读写电子标签
项目八 PLC对RFID的数据读取操作
项目九 PLC对RFID的数据写入操作
项目十 智能视觉系统应用
项目十一 智能视觉编号比对测量
项目十二 智能视觉颜色比对测量
项目十三 智能视觉角度比对测量
项目十四 智能视觉角度比对测量
项目十五 智能视觉表达式及输出结果
项目十六 工业机器人与智能视觉系统综合应用