


更多相关产品
- LGZN-SZ02L型智能制造数字孪生虚拟仿真实训室
- LGGY-DS23型大田耕种机器人实训装置
- LGGY-DS22型物理除草机器人实训装置
- LGGY-DS21型大田作业机器人实训装置
- LGGY-DS20型果园喷雾机器人实训装置
- LGGY-DS19型果园采摘机器人实训装置
- LGGY-DS18型果园应用开发通用平台实训装置
- LGGY-DS17型智能割草机器人实训装置
- LGGY-DS16型双臂复合机器人实训装置
- LGGY-DS15型七自由度机械臂实训装置
- LGGY-DS14型六自由度机械臂套件实训装置
- LGGY-DS13型具身复合机器人创新设计套装实训装置(增强版)
- LGGY-DS12型便携式ROS导航机器人学习平台实训装置
- LGGY-DS11型基于大模型的智慧零售平台实训装置
- LGGY-DS10型农业智能车实训装置
- LGGY-DS09型智能服务机器人实训装置
- LGGY-DS08型ROS基础教学智能车实训装置
- LGGY-DS07型视觉语音智能车实训装置
- LGGY-DS06型人形机器人实训装置
- LGGY-DS05型6足18自由度圆形仿生机器人实训装置
- LGGY-DS04型无人驾驶深度学习智能车实训装置
- LGGY-DS03型商服机器人-机械臂版及场地实训装置
- LGGY-DS02型计算机视觉平台实训装置
- LGGY-DS01型智能汽车及赛道实训装置
- LGGY-Z08型智能制造综合产线
- LGGY-SJ03型机器人视觉分拣螺母工作站实训系统
- LGGY-WH05型工业机器人维护维修基础教学工作站
- LGGY-F6A型服务机器人应用技术实训平台
- LGGY-K50型工业机器人应用工作站
- LGGY-R04型工业机器人一体化实训平台
- LGGY-R02B型智能生产线运行与维护综合实训装置
- LGGY-T03A型智能制造单元系统集成应用平台
- LGGY-W01A型工业机器人应用工作站
- LGGY-S2型工业机器人与智能视觉系统应用实验平台
- LG-MPS02型模块化柔性自动化生产线实训系统(八站)
- LGJ-IMS03型工业机器人模块化智能生产线实训系统
- LGJ-KY02型智能机器人智能制造综合实操工作站
- LGJ-QBJ01型工业机器人模拟汽车领金冲压集成制造实训系统
- LGJ-CNC02型工业机器人智能生产流水线实训平台
- LGJ-ZH03型工业机器人组合式应用实训装置
LGGY-R02B型智能生产线运行与维护综合实训装置

一、概述
LGGY-R02B型智能生产线运行与维护综合实训装置是一种最为典型的机电一体化与自动化产品,是为职业院校、职业教育培训机构而研制的, 装置适合机电一体化、电气自动化等相关专业的教学和培训。装置在接近工业生产制造现场基础上又针对教学及实训目的进行了专门设计的实训教学设备,强化了自动化生产线的安装与调试能力。
智能生产线运行与维护综合实训装置由六部分组成,分别为:供料机构、搬运机构、加工与检测机构、搬运分拣机构、装配机构、成品分拣机构,完成工件上料、搬运、加工、检测、输送、装配、分拣等功能。装置涵盖了自动化类中机电一体化和电气自动化专业中所涉及的PLC控制、变频调速、传感检测、气动、步进电机驱动与调速、机械结构安装与系统调试等内容。通过基于该实训系统的使用、训练和培训,能充分锻炼操作者团队协作能力、计划组织能力、自动线安装与调试能力、工程实施能力、职业素养、交流沟通能力、效率、成本和安全意识,引导高职院校自动控制类专业教学改革发展方向,促进工学结合人才培养模式改革与创新,培养可持续发展的满足企业需求的自动化控制高技能人才。
通过工作任务训练,能充分锻炼操作者团队协作能力、自动线拆装与调试能力、工程实施能力和安全意识。引导职业院校机电及自动化等专业教学改革,满足电气自动化控制综合装置和自动化技术专业的核心能力训练要求。
二、技术性能
1、输入电源:三相五线~380V±10% 50Hz
2、工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
3、装置容量:<1.5kVA
4、外形尺寸:≥2100mm×800mm×1500mm
5、安全保护:具有漏电压、漏电流保护,安全符合国家标准
三、系统组成
1、供料站
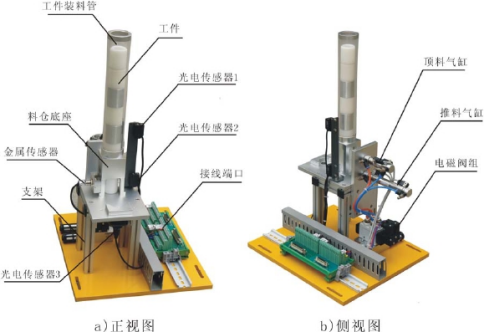
主要由井式工件库、推料气缸、物料台、光电传感器、磁性开关、电磁阀、支架、机械零部件构成。工作过程描述:系统启动后,推料气缸推出,把工件库中底层的工件推至物料台上。工件到位传感器检测到工件到位后,推料气缸缩回。搬运机械手伸出并抓取该工件,并将其运送至切削加工站。
2、加工站
主要由主要包括滑动料台,模拟冲头和冲床, 磁性开关、电磁阀,带保护接线端子单元等组成。工作过程描述:把该单元物料台上的工件送到冲压机构下面,完成一次冲压加工动作,然后再送回到物料台上,待输送单元的抓取机械手装置取出。
3、装配站(三工位)

主要由井式供料单元、三工位旋转工作台、平面轴承、冲压装配单元、光电传感器、电感传感器、磁性开关、电磁阀、步进电机及驱动器、支架、机械零部件构成。工作过程描述:该站主要完成大小工件的紧合装配过程。当搬运站气动机械手把工件运送到装配站旋转工作台上后,旋转工作台顺时针旋转,将工件旋转到井式供料单元下方,井式供料单元顶料气缸伸出顶住倒数第二个工件;挡料气缸缩回,工件库中底层的工件落到待装配工件上,挡料气缸伸出到位,顶料气缸缩回物料落到工件库底层,同时旋转工作台顺时针旋转,将工件旋转到冲压装配单元下方,冲压气缸下压,完成工件紧合装配后,气缸回到原位,旋转工作台顺时针旋转到待搬运位置后,搬运站气动机械手伸出并抓取该工件,并将其运送往物料分拣站。
4、分拣站
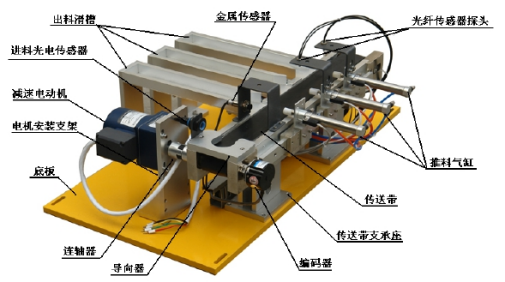
主要由传送带、变频器、三相交流减速电机、旋转气缸、磁性开关、电磁阀、调压过滤器、光电传感器、光纤传感器、对射传感器、支架、机械零部件构成。工作过程描述:该站主要完成对上站传送至本站的装配完毕的工件进行分拣。系统入料口光电传感器检测到有工件,变频器启动并带动传送带运动,将工件送入分拣区,通过旋转气缸将白色工件推入1号料槽、黑色工件导入2号料槽,传输皮带停止工作,等待下一个工件,同时计数器记录工件入库个数。
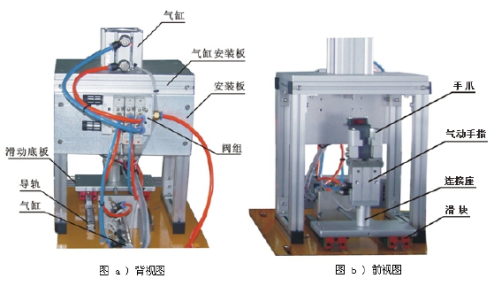
5、搬运站
主要由交流伺服电机及驱动器、直线导轨、四自由度搬运机械手、定位开关、行程开关、支架、机械零部件构成。工作过程描述:该站主要完成向各个工作站输送工件。系统复位先回原点,当到达原点位置后,系统启动,井式供料站送料到物料台后,光电传感器检测到有工件时,搬运机械手伸出将工件搬运到切削加工站物料台上,等加工站加工完毕后,再将工件送到三工位装配站完成两种不同工件装配,最后将两种工件成品送到分拣站分拣入库。
四、系统配置清单
|
序号
|
名称
|
规格
|
数量
|
单位
|
备注
|
|
1
|
工作台
|
≥1980mm×800mm×800mm
|
1
|
张
|
|
|
2
|
PLC模块
|
CPU 1214C (AC/DC/RLY)
|
2
|
台
|
|
|
CPU 1214C (AC/DC/RLY)+1路模拟量输出模块
|
1
|
台
|
|
||
|
CPU 1214C (DC/DC/DC)+8入8出模块
|
2
|
台
|
|
||
|
3
|
变频器模块
|
功率≥0.37kW
|
1
|
台
|
|
|
4
|
触摸屏模块
|
7032KT 7英寸 TFT真彩,65K色
|
1
|
套
|
|
|
5
|
电源模块
|
三相电源总开关(带漏电和短路保护)1个、熔断器4只、单相三极电源插座4个、DC24 5A电源
|
1
|
块
|
|
|
6
|
控制单元模块
|
配备有DC24V指示灯:黄色(L1)、绿色(L2)、红色(L3)各一只。主令器件:绿色常开按钮SB1一只,红色常开按钮SB2一只,黄色常开按钮SB3一只,选择开关SA(一对转换触点),急停按钮QS(一个常闭触点)。
|
1
|
块
|
|
|
7
|
供料机构
|
主要由井式工件库、推料气缸、物料台、光电传感器、磁性开关、电磁阀、支架、机械零部件构成。
|
1
|
套
|
|
|
8
|
加工机构
|
主要由物料台、物料夹紧装置、龙门式二维运动装置、主轴电机、刀具以及相应的传感器、磁性开关、电磁阀、步进电机及驱动器、主轴电机、滚珠丝杆副、支架、机械零部件构成。
|
1
|
套
|
|
|
9
|
装配机构
|
主要由:井式供料单元、三工位旋转工作台、平面轴承、冲压装配单元、光电传感器、电感传感器、磁性开关、电磁阀、步进电机及驱动器、支架、机械零部件构成。
|
1
|
套
|
|
|
10
|
分拣机构
|
主要由:传送带、变频器、三相交流减速电机、旋转气缸、磁性开关、电磁阀、调压过滤器、光电传感器、光纤传感器、对射传感器、计数器、支架、机械零部件构成。
|
1
|
套
|
|
|
11
|
搬运机构
|
主要由:交流伺服电机及驱动器、直线导轨、四自由度搬运机械手、定位开关、行程开关、支架、机械零部件构成。
|
1
|
套
|
|
|
12
|
工 件
|
含大小黑白工件
|
1
|
套
|
|
|
13
|
电源线
|
单相三芯电源线
|
4
|
根
|
|
|
14
|
实训导线
|
强电、弱电连接导线
|
1
|
套
|
|
|
15
|
PU气管
|
Ф4/Ф6若干
|
1
|
套
|
|
|
16
|
气动接头
|
气动快插式三通接头EPE6
|
5
|
只
|
|
|
17
|
PLC编程电缆
|
网线
|
2
|
根
|
|
|
18
|
配套U盘
|
包含PLC编程软件、使用手册、程序等
|
1
|
套
|
|
|
19
|
配套工具
|
工具箱:十字长柄螺丝刀、大、中、小号一字螺丝刀,中、小号十字螺丝刀,钟表螺丝刀,剥线钳,尖嘴钳,剪刀,电烙铁,验电笔,万用表,镊子,活动扳手,内六角扳手(8把)
|
1
|
套
|
|
|
20
|
型材电脑桌
|
4080铝合金(带槽),长度:≥815mm,壁厚:≥2mm,不少于2根;
4080铝合金,长度:≥510mm ,壁厚:≥2mm,不少于2根;
桌面板,尺寸:≥650x550x25mm,不少于1张;
4080铝合金塑料端盖圆弧,不少于2个;
4080铝合金塑料端盖平,不少于4个;
直角支撑,钣金厚度:≥1.5mm ,尺寸:≥200x150x40mm,不少于2个;
桌面支撑钣金,厚度:≥1.5mm,尺寸:≥570x400x120mm,不少于1张;
福马轮,GD-40F,不少于4只。
|
1
|
张
|
|
|
21
|
静音气泵
|
0.4~0.8MPa
|
1
|
台
|
|
五、PLC仿真教学软件及资源包
1、系统由微课学习、编程实训、创意实训和个人中心四个模块组成。
2、微课学习包括视频和元件库两个模块,可通过树形菜单选择。视频资源包括PLC相关的学习视频20个,涵盖PLC知识讲解、PLC编程、软件使用和实物操作等种类。
3、元件库主要包括与PLC相关的低压电气元件、传感器和执行器,建立了三维数字模型并进行虚拟展示,三维模型总数不少于20个。点击任意元件,可展示元件的三维模型,能够进行三维交互,包括缩放、旋转、平移,能够对零件进行360°观看。
4、编程实训模块主要由典型的PLC实训项目组成,分为初级实训和中级实训两个类别。编程实训需要针对固定的实验场景进行编程实训,编程实训项目的数量不少于20个。
5、通过实训项目树形菜单与实训项目图片按钮均可进入实训场景,实训场景为相关的三维虚拟场景,场景可进行放大、缩小、旋转等交互操作。
6、可进行实训项目通信设置:点击通信设置按钮可打开PLC连接设置,可选择西门子S_200实物、S_300实物、S_300虚拟、三菱等不同的控制器,连接成功通信状态指示灯变绿。
7、可查看实训项目点位配置:点击配置按钮可打开配置界面,查看PLC点位设置,配置传感器和执行器的点位。
8、可实现自动考核:点击考核按钮将进入考核模式,该模式中自动执行PLC程序,并对程序进行检测,检测完毕后进行自动打分,当PLC未连接或处于运行状态时,考核模式不会启动。
9、仿真运行:连接PLC后点击运行按钮可进入操作状态,在三维场景中就可仿真程序的运行结果,查看程序的正确性,如果程序错误,三维场景会有错误的提示。
10、创意实训可以自主搭接实训场景,实训场景具备保存和导入功能。
11、创意实训需要具备零件库,零件库中零件的数量不少于50个,软件能够对零件进行分类管理,零件分类发/接收器、货物、重型传送设备、轻型传送设备、传感器、安全设备、操作站、工作站等种类。
12、创意实训场景中的物体具备物理模型,能够反映物体的运动状态,搭建的时候能够进行干涉检测,可以在三维场景中移动零件的位置。实训中的传送带类零件,能够调整传送带的速度及转向。
13、创建物体后,鼠标放置物体上。单击鼠标右键可查看相应功能或属性。在场景中可实现零件的删除、位置升降、旋转等操作。
14、实训场景搭建之后,能够配置传感器和执行器与PLC的连接关系,对于传感器和执行器,可以设置高电平有效还是低电平有效。每个控制对象的IO点都可以单独设定。
15、联机设定:可选择通信协议方式和PLC实物或者虚拟,通过输入IP地址或者站点号进行连接。
16、个人中心能够查看学生的学习情况及实训项目的考核情况,展示视频学习情况、实训项目考核成绩及通过状态。
17、视频演示。
18、多功能电参数测量系统(配置1套供授课教师使用)
六、实训项目
1、气动控制回路安装与调试
该配置配有多种类型的气缸、电磁阀,磁性开关,如:单出杆气缸、单出双杆气缸、旋转气缸等气动执行元件、单控电磁阀、双控电磁阀和磁性开关等,基于这些气动控制元件,可完成下列气动技术的安装调试训练任务:
(1)气动方向控制回路的安装与调试
(2)气动速度控制回路的安装与调试
(3)气动旋转控制回路的安装与调试
(4)气动顺序控制回路的安装与调试
(5)气动机械手装置的安装与调试
(6)气动系统的安装与调试
2、电气控制电路的安装和PLC程序编写
该装置配有PLC主机模块、变频器模块、伺服电机驱动模块、步进电机驱动模块和各种传感器等,基于这些模块,可完成下列PLC应用技术训练任务:
(1)异步电机控制电路的连接与控制程序编写
(2)异步电机调速控制电路的连接与控制程序编写
(3)步进电机控制电路的连接与控制程序编写
(4)交流伺服电机控制电路的连接与控制程序编写
(5)气动方向控制程序编写
(6)气动顺序动作控制程序编写
(7)气动机械手控制程序编写
(8)皮带输送控制程序编写
(9)自动生产线控制程序编写
3、PLC工业通讯网络的安装及调试
选用PLC作为主控制器,其本身集成以太网通信口具备以太网通信功能,基于本网络通信功能,可完成下列工业现场总线通信技术训练任务:
(1)以太网络的硬件连接、调试
(2)以太网络参数设置、调试
(3)基于多台PLC的复杂网络数据读写程序编写与调试
4、机电设备安装与调试项目
井式供料、切削加工、多工位装配、气动机械手搬运、皮带传送分拣等工作站及相应的电源模块、按钮模块、PLC模块、变频器及交流电机模块、步进电机驱动模块、伺服电机驱动模块和各种工业传感器等控制检测单元为硬件平台,可完成下列机电设备安装和控制的训练任务:
(1)井式供料机构的安装与调试
(2)切削加工机构的安装与调试
(3)多工位装配机构的安装与调试
(4)气动机械手设备安装与调试
(5)输送线设备安装与调试
(6)工件分拣机构的安装与调试
(7)自动生产线系统安装与调试