


更多相关产品
- LGZN-SZ02L型智能制造数字孪生虚拟仿真实训室
- LGGY-DS23型大田耕种机器人实训装置
- LGGY-DS22型物理除草机器人实训装置
- LGGY-DS21型大田作业机器人实训装置
- LGGY-DS20型果园喷雾机器人实训装置
- LGGY-DS19型果园采摘机器人实训装置
- LGGY-DS18型果园应用开发通用平台实训装置
- LGGY-DS17型智能割草机器人实训装置
- LGGY-DS16型双臂复合机器人实训装置
- LGGY-DS15型七自由度机械臂实训装置
- LGGY-DS14型六自由度机械臂套件实训装置
- LGGY-DS13型具身复合机器人创新设计套装实训装置(增强版)
- LGGY-DS12型便携式ROS导航机器人学习平台实训装置
- LGGY-DS11型基于大模型的智慧零售平台实训装置
- LGGY-DS10型农业智能车实训装置
- LGGY-DS09型智能服务机器人实训装置
- LGGY-DS08型ROS基础教学智能车实训装置
- LGGY-DS07型视觉语音智能车实训装置
- LGGY-DS06型人形机器人实训装置
- LGGY-DS05型6足18自由度圆形仿生机器人实训装置
- LGGY-DS04型无人驾驶深度学习智能车实训装置
- LGGY-DS03型商服机器人-机械臂版及场地实训装置
- LGGY-DS02型计算机视觉平台实训装置
- LGGY-DS01型智能汽车及赛道实训装置
- LGGY-Z08型智能制造综合产线
- LGGY-SJ03型机器人视觉分拣螺母工作站实训系统
- LGGY-WH05型工业机器人维护维修基础教学工作站
- LGGY-F6A型服务机器人应用技术实训平台
- LGGY-K50型工业机器人应用工作站
- LGGY-R04型工业机器人一体化实训平台
- LGGY-R02B型智能生产线运行与维护综合实训装置
- LGGY-T03A型智能制造单元系统集成应用平台
- LGGY-W01A型工业机器人应用工作站
- LGGY-S2型工业机器人与智能视觉系统应用实验平台
- LG-MPS02型模块化柔性自动化生产线实训系统(八站)
- LGJ-IMS03型工业机器人模块化智能生产线实训系统
- LGJ-KY02型智能机器人智能制造综合实操工作站
- LGJ-QBJ01型工业机器人模拟汽车领金冲压集成制造实训系统
- LGJ-CNC02型工业机器人智能生产流水线实训平台
- LGJ-ZH03型工业机器人组合式应用实训装置
LGGY-WH05型工业机器人维护维修基础教学工作站

一、功能介绍
工业机器人作为自动生产线上最重要的执行设备,日常维护、常见简单故障排除及维修操作,是生产企业一线操作工必备的应用技能。随着工业机器人市场的飞速发展,单纯依靠制造企业完成工业机器人的维护及维修服务是不可能的,第三方服务商市场前景广阔。工业机器人作为精密机电一体化设备,高性能核心部件和精密装配精度是其性能的重要保障手段,在合理、规范、专业的操作前提下,可以完成大量的维护操作和简易维修工作,解决现场应急问题。
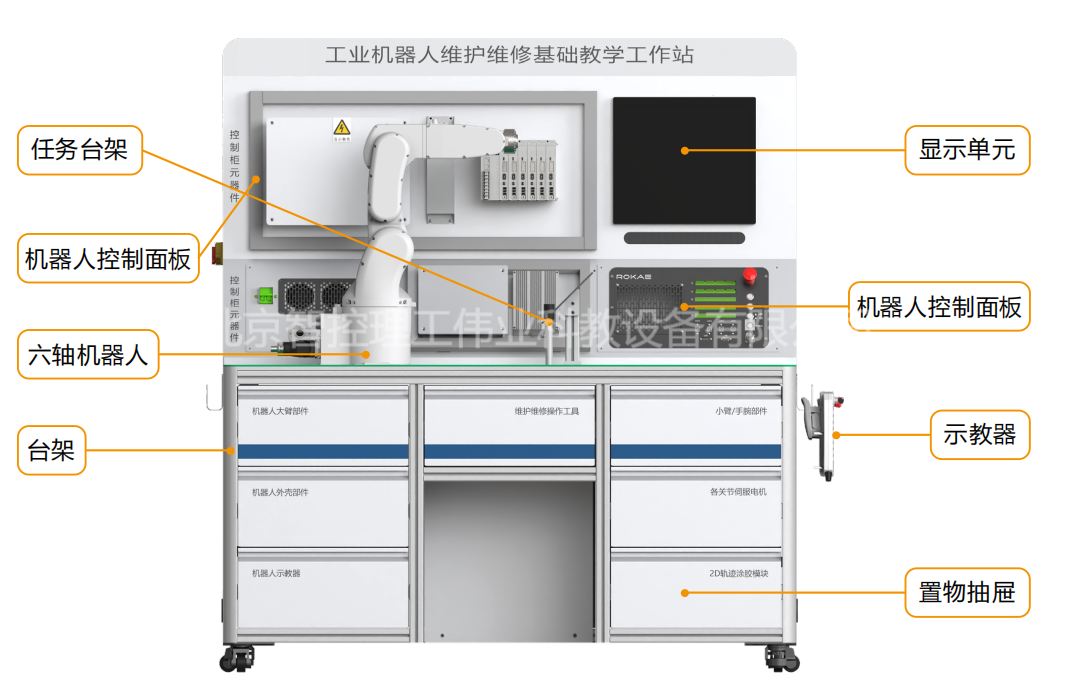
工业机器人维护维修基础教学工作站,以工业机器人本体及其控制系统最常见维护维修操作为核心,通过对典型故障的诊断和排除,按照规范步骤完成对工业机器人本体的拆装过程,并根据图纸要求搭建控制系统并接线,由零件级深入了解工业机器人的构成形式和运动方式,掌握基础维护维修技能。工作站配套了与生产厂家完全相同的工装、工具,让学生可以在教学环境中充分体验高精度机电设备的生产工艺要求,确实掌握维护维修技能。
二、技术参数
输入电源:交流220V,频率50Hz
额定功率:3kW
安全保护:急停开关、漏电保护、短路保护、过载保护
设备台架:整体尺寸1600mm×930mm×1760mm,此设备为单站形式,所有组件均集成在设备台架上
建议实训人数:2人/台
工业机器人本体:工作半径596mm,手腕最大负载4kg,重复定位精度±0.02mm
工业机器人控制系统:可实现6轴联动控制,TPU(示教器)
功能模块单元:TCP校准功能单元,涂胶单元
显示终端:一套
三、主要模块介绍
1)六轴机器人
该实训平台选用珞石机器人,该机器人本体的各项具体参数为:多功能教学平台配置了珞石公司的工业机器人,该机器人具有外形紧凑、体积小、重量轻的特点,如图所示:
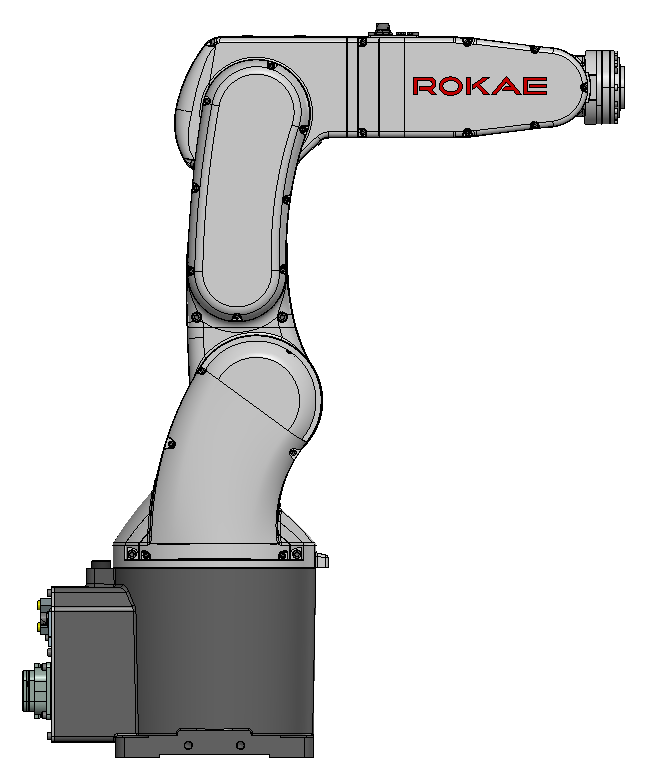
通过工业机器人机械本体实际拆装和测绘训练,加深和巩固机械结构分析、表达能力,提高拆装机械部件的操作技能,为从事工业机器人维护和保养工作打下必要基础。机器人拆装的零部件可放入相对应的抽屉。
机器人拆装示例如下图所示:

2)工业机器人控制系统
电源开关、插座、控制器、驱动器、继电器以及伺服电机等电气元件一目了然,学生们可以更加全面的认识机器人本体核心模块控制器应用以及机器人本体电气电路的应用。如图所示。
通过控制系统与工业机器人间的重载线、示教器线、IO模块接线,了解各模块间的连线方式;通过驱动板与伺服电机的连接线,可直观连接各个运动轴是如何连接控制的;通过控制系统的急停接线,了解工业机器人安全保护机制;通过控制面板上的“急停”等按钮,可直观看到他们的接线方式以及控制原理。
3)维护维修操作工具
拆装工具放置于17寸工具箱内。
提供包括以下的拆装工具:
操作工具包括:内六角扳手组1套;斜口钳1把;开口扳手1把;万用表1个;十字螺丝批1套;一字螺丝批1套。
4)涂胶模块
组成:涂胶单元主要由2D轨迹单元和TCP工具组成。
功能:可实现TCP标定,坐标系建立,不同形状轨迹的示教编程。
涂胶模块是将工业机器人对产品装配前的涂胶工艺进行功能抽象化,工业机器人末端工具沿涂胶面板上不同轮廓轨迹运动,模拟涂胶工艺,保证工艺真实性同时增加教学可行性和趣味性。采用铝制机加零件,通过与型材连接固定在台面上,采用氧化处理防锈。TCP定位采用镀铬光轴材料,为机加零件。
5)显示终端
显示终端一套。安装在设备正面,学生可通过此显示器观看拆装教程,接线流程,测试流程等视频,能够快速了解机器人内部构造以及原理,并且可作为实训指导帮助学生轻松完成实训内容。
6)台架
设备台架采用型材架体,外围具有钣金,上面铺设有铝板及防静电桌面,作为机器人以及任务模块的安装底面。前方具有抽屉,机器人拆解各部件可放置到对应抽屉中。
四、实训项目
机座组件不稳的维护与维修操作
机座组件线缆损坏的维护与维修操作
旋转座组件J1、J2轴电机烧毁的维护与维修操作
大臂组件紧固件松脱的维护与维修操作
腕关节组件J5轴同步带疲劳更换的维护与维修操作
腕关节组件J6轴谐波减速器损坏的维护与维修操作
控制系统控制线路维护与维修操作
控制系统伺服驱动的维护与维修操作
工业机器人整体线路检查
工业机器人通电测试及系统配置
工业机器人基础操作测试
电气接线故障的设置与排除考核项目
|
工业机器人维护维修拆装工作站
|
工业机器人本体
1) ★六自由度串联关节型工业机器人。
2) ★手腕负载4kg。
3) ★最大臂展596mm。
4) 本体重量32kg。
5) 重复定位精度±0.02mm。
6) 手腕设有8路集成信号源,4路集成气源
7) 各关节最大运行速度为,1轴440°/s,2轴355°/s,3轴440°/s,4轴490°/s,5轴450°/s,6轴720°/s。
7) 各关节工作角度范围为,1轴±170°,2轴+144°~-80°,3轴+54°~-194°,4轴±170°,5轴±119°,6轴±360°。
8) 手腕允许最大负载力矩为,4轴4.59Nm,5轴4.59Nm,6轴3.1Nm。
9) 手腕允许最大负载惯量为,4轴0.2kgm2,5轴0.2 kgm2,6轴0.08 kgm2。
11) 驱动组件采用高性能伺服电机,所有部件已安装到本体上。
12)各轴均采用谐波减速器,已安装到本体上。
工业机器人控制系统
1)供电为220V交流电,50HZ。
2)运动控制方面:控制器以全动力学模型为基础,拥有OptiMotion、TrueMotion、SafeMotion、SoftMotion等关键技术,可大幅缩短节拍时间、提高路径精度,机器人保证在不同速度下运动轨迹均一致。
3)xPad示教器显示器参数:TFT 9.7-inch LCD 1024*768,急停按钮、模式选择钥匙开关(自动、手动),一个USB2.0外部接口,防护等级IP65。
4)提供完备的电路保护,包括安全开关、紧急停止、过载保护等。
5)通信:支持先进的EtherCAT、ProfiNET、Ethernet / IP等。
6) 工业机器人控制系统所有低压电器元器件安装在展柜式控制台上,高压电器元器件布置在柜体内。
设备台架
此设备为单站形式,所有组件均集成在设备台架上。
铝合金型材框架,台面为8mm铝板,具有强度高,重量轻等特点。
3) 整体尺寸1600mm长×宽930mm×高1760mm。
4) 台架中间安装有抽屉,用于放置维护维修操作工具,功能调试配套工具,和拆卸下来的零部件。
5) 底部安装有福马脚轮,方便移动和固定。
6) 机器人控制柜拆分装在钣金壳体上,可直观、明了、全面观察控制柜结构与原理。
1)操作工具包括:内六角扳手组1套;万用表1个;工具若干。
2)17寸工具箱,收纳工具。
涂胶、TCP校准功能单元
涂胶、TCP校准功能单元,训练分为平面轨迹训练和TCP校准训练。
平面轨迹上有不同的图形,可实现不同路径。通过型材连接到台面上。
3)提供工具TCP参数标定用尖锥,材质镀铬光轴,通过螺纹固定在设备台面上。
4)TCP校准工具,材质光轴配合工装,可装在机器人的末端。通过此工具可实现机器人快速校准。
配套离线编程软件×1
1) 正版软件,可提供持续的中文技术支持服务、软件可使用所有功能模块。
2) 包含与“工业机器人维护维修基础教学工作站”硬件平台一致的三维模型环境,可直接从离线编程软件中调用,方便教学、训练。
3) 采用通用3D技术,与CAD教学衔接,支持3D CAD系统的模型文件导入,可通过三维球功能对模型进行平移、旋转操作。
4) ★轨迹生成基于CAD数据,简化轨迹生成过程,提高精度,可利用实体模型、曲面或曲线直接生成运动轨迹。
5) 包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限功能。
6) 包含涂胶和码垛工艺包,可以方便的完成复杂轨迹涂胶和物料的码垛拆垛工序编程。
7) 支持工具快换功能,可以方便的仿真并输出工业机器人对工具快换系统的操作,扩展工业机器人应用范围,使工业机器人可以在涂胶工具和夹爪工具间自由切换。
|