


更多相关产品
- LGZN-SZ02L型智能制造数字孪生虚拟仿真实训室
- LGGY-DS23型大田耕种机器人实训装置
- LGGY-DS22型物理除草机器人实训装置
- LGGY-DS21型大田作业机器人实训装置
- LGGY-DS20型果园喷雾机器人实训装置
- LGGY-DS19型果园采摘机器人实训装置
- LGGY-DS18型果园应用开发通用平台实训装置
- LGGY-DS17型智能割草机器人实训装置
- LGGY-DS16型双臂复合机器人实训装置
- LGGY-DS15型七自由度机械臂实训装置
- LGGY-DS14型六自由度机械臂套件实训装置
- LGGY-DS13型具身复合机器人创新设计套装实训装置(增强版)
- LGGY-DS12型便携式ROS导航机器人学习平台实训装置
- LGGY-DS11型基于大模型的智慧零售平台实训装置
- LGGY-DS10型农业智能车实训装置
- LGGY-DS09型智能服务机器人实训装置
- LGGY-DS08型ROS基础教学智能车实训装置
- LGGY-DS07型视觉语音智能车实训装置
- LGGY-DS06型人形机器人实训装置
- LGGY-DS05型6足18自由度圆形仿生机器人实训装置
- LGGY-DS04型无人驾驶深度学习智能车实训装置
- LGGY-DS03型商服机器人-机械臂版及场地实训装置
- LGGY-DS02型计算机视觉平台实训装置
- LGGY-DS01型智能汽车及赛道实训装置
- LGGY-Z08型智能制造综合产线
- LGGY-SJ03型机器人视觉分拣螺母工作站实训系统
- LGGY-WH05型工业机器人维护维修基础教学工作站
- LGGY-F6A型服务机器人应用技术实训平台
- LGGY-K50型工业机器人应用工作站
- LGGY-R04型工业机器人一体化实训平台
- LGGY-R02B型智能生产线运行与维护综合实训装置
- LGGY-T03A型智能制造单元系统集成应用平台
- LGGY-W01A型工业机器人应用工作站
- LGGY-S2型工业机器人与智能视觉系统应用实验平台
- LG-MPS02型模块化柔性自动化生产线实训系统(八站)
- LGJ-IMS03型工业机器人模块化智能生产线实训系统
- LGJ-KY02型智能机器人智能制造综合实操工作站
- LGJ-QBJ01型工业机器人模拟汽车领金冲压集成制造实训系统
- LGJ-CNC02型工业机器人智能生产流水线实训平台
- LGJ-ZH03型工业机器人组合式应用实训装置
LGGY-W01A型工业机器人应用工作站
一、设备概述
LGGY-W01A型工业机器人应用工作站属于基础技能培训应用设备,以6轴机器人为中心,根据任务要求配置不同任务载体,培养学生对机器人基础知识的认知。任务模型的开发融入了趣味性与娱乐性,可以增加学员的学习兴趣,通过不断的重复训练,强化学员对基本的点示教、直线、曲线等运动足迹的了解与掌握,学习精确点的定位及机器人运动路线选择优化;使学生对机器人应用技术有初步了解与掌握。
LGGY-W01A型工业机器人应用工作站任务载体采用模块化设计,具备独立性、兼容性、可移植性等特点;并预留了扩展与升级的接口,根据市场需求进行不断的开发升级或者学校用户自行创新设计新的功能模块。
二、技术参数
1、工作电源:单相三线220V±5% 50HZ
2、安全保护:漏电保护,过流保护,短路保护
3、额定功率:≤2KW
4、环境温度:-10~50℃
5、相对温度:≤85%
6、外形尺寸:3000mm×3500mm×1200mm
三、配置及参数
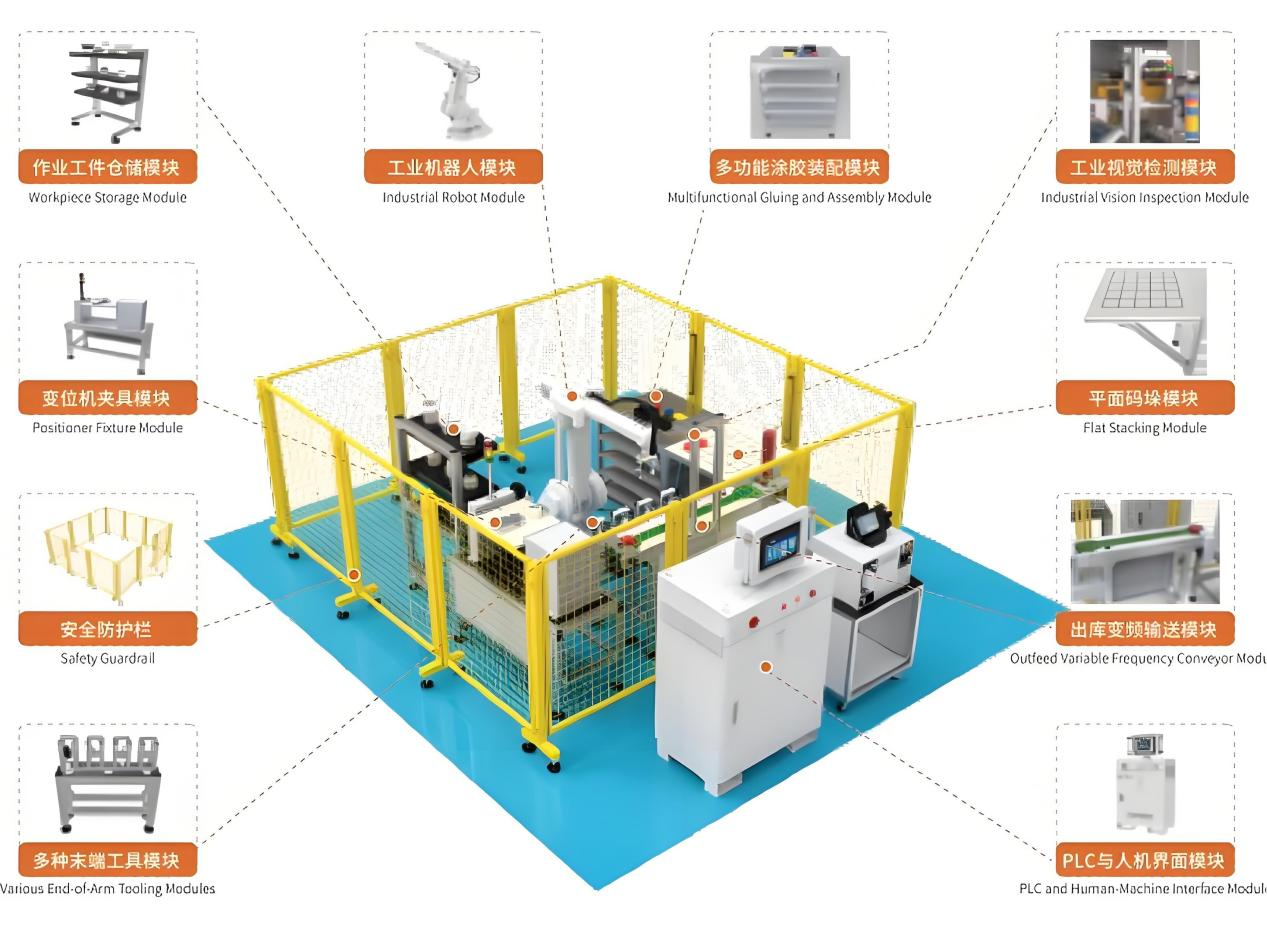
LGGY-W01A型工业机器人应用工作站主要由六轴工业机器人及底座、实训平台、电气控制PLC与人机界面模块、轨迹训练模块、工件装配模块、涂胶装配模块、平面码垛模块、图块搬运模型、多种末端工具模块、工业视觉检测模块、安全护栏、及耗材包组成。
1、六轴工业机器人及底座:
(1)机器人本体参数
1) 自由度:6自由度
2)有效负载:5kg
3) 重复定位精度:±0.05mm
4) 本体重量:225kg
5) 最远到达距离:1.44米
技术参数:
|
型号
|
IRB1410
|
|
|
品牌
|
ABB
|
|
|
负载能力
|
5Kg
|
|
|
控制轴
|
6轴
|
|
|
重复定位精度
|
0.02mm
|
|
|
最大动作范围
|
J1轴
|
+170°/-170°
|
|
J2轴
|
+70°/-70°
|
|
|
J3轴
|
+70°/- 65°
|
|
|
J4轴
|
+150°/ -150°
|
|
|
J5轴
|
+115°/-115°
|
|
|
J6轴
|
+300°/-300°
|
|
|
最大动作速度
|
J1轴
|
120°/s
|
|
J2轴
|
120°/s
|
|
|
J3轴
|
120°/s
|
|
|
J4轴
|
280°/s
|
|
|
J5轴
|
280°/s
|
|
|
J6轴
|
280°/s
|
|
|
工作半径
|
1440 mm
|
|
|
环境温度(运行中)
|
+5°C(41°F)至 +45°C(122°F)
|
|
|
安装方式
|
落地式
|
|
|
防护等级
|
IP54
|
|
|
本体重量
|
225Kg
|
|
|
供电电源
|
200-600 V,50/60 Hz
|
|

ABB工业机器人(IRB1410)
(2)OmniCore E10控制器:
1)紧凑型工业机器人控制柜,与配套的工业机器人本体配套;
2)控制硬件:多处理器系统大容量闪存、 UPS备份电源(≥20S);
3)控制软件:软件出厂预装;
4)额定功率:≥3KVA(变压器容量);
5)电源输入:200V/230V 50-60Hz
6)尺寸:445*340*105mm
7)重量:12kg
8)防护等级:IP20
(3)FlexPendant示教器
1)重量:1kg
2)支持:彩色触摸屏、操纵杆,紧急停、支持惯用左/右手切换,支持U盘、热插拔、恢复程序,支持USB储存器,带时间标记登录,支持远程服务。
2、实训平台:平台支撑板采用2mm厚钢材经过机械加工折弯成型,表面喷涂处理;台面采用520×266×15mm厚钢板加工而成,表面镀铬处理,间隔40×40mm开M4螺纹通孔,用于安装不同任务模型;并在一侧安装电气接口盒,提供一个急停按钮用于紧急情况下使用,6位按压式端子,使用于任务模型训练的输入/输出接线,方便快捷,一路气路输出口及气压调节控制,可对训练提供需要的气源。
3、电气控制PLC与人机界面模块:
(1)触摸屏:≥7英寸;液晶显示屏分辨率:≥800×480;组态:嵌入式组态;提供与PLC通讯相配套的端口线和工控机连接的端口线。
(2)PLC:S7-1200 CPU1214C 用户存储器 :75 KB 工作存储器/4 MB 负载存储器,可用 SD 卡扩展/10 KB 保持性存储器;板载数字 I/O :14 点输入/10 点输出;板载模拟 I/O: 2 路输入;过程映像大小: 1024 字节输入(I)/1024 字节输出(Q);位存储器(M): 8192 个字节;临时(局部)存储器• 16 KB 用于启动和程序循环(包括相关的 FB 和 FC)
4、出库变频输模块::由井式送料模块、输送带模块、变频器等组成,配置可移动底板。将工件从送料模块送出到输送带运行至末端由机器人夹取搬运至装配固定气缸上进行装配操作。可实现送料、检测、运输、搬运、装配等实训操作。井式送料模块有双轴气缸1只、电磁阀1个、磁开关1个、光纤传感器1个。
5、轨迹训练模型:不锈钢加工制造,通过在平面、曲面上蚀刻不同图形规则的图案(直线、圆形、三角形、五角星螺旋形等线条),以笔形绘图夹具描绘图形,训练对机器人基本的点示教,直线、曲线运动足迹的掌握;
6、工件装配模型:以一个固定在操作台工件为“主体工件”;机器人通过抓手或吸盘拾取“装配工件”并把“装配工件”精确装配到“主体工件”内;训练对机器人精确定位及抓手吸盘夹具的学习。
7、涂胶装配模块:涂胶机、模型、工件板分别固定到操作台上;机器人通过吸盘夹具拾取工件板上工件;并对模型进行模拟涂胶,完成后把工件装配到模型上;练习对机器人点的示教、机器人运动轨迹选择及与涂胶机的配合。
8、平面码垛模型:铝材加工氧化的物料摆放底板和码垛底板固定到操作台;根据要求物料块被摆放到摆放底板上,机器人通过吸盘夹具按要求拾取物料块进行码垛任务;物料块有长方形和正方形两种,操作者可根据需要选择摆放;可根据需要自由组合码垛出多种形状; 练习对机器人码垛、阵列的理解并快速编程示教的应用技能。
9、工业视觉检测模块:主要是配合工业机器人做智能检测工件角度缺陷及自动对位等以及工业机器人视觉学习开发使用;工业相机,要求如下:像素:≥130W像素; 分辨率:≥1280×960; 像素尺寸:≥3.75μm× 3.75μm; 光谱:彩色; 支持自定义AOI,降低分辨率、f≥16mm F1.4:12毫米工业镜头,百万像素相机; 配套同轴光源,光源大小≥80mm×80mm;准环形光源,直径≥70mm,照射角度≥90度,带模拟控制器;配套同轴光源及光源控制器:发光窗口≥50mm*50mm含调光控制电源;机器视觉兼视觉开发环境。
10、变位机夹具模块:夹具固定工件,并由伺服控制变位机与机器人配合进行位置切换,完成模拟焊接实训。模块包括伺服电机1个、伺服驱动器1个、并配置标准安装机构,移动式底板,标准电气接口。
10、仓储模块:仓位数量:≥3列3层9个;仓位承重:≥2Kg;仓位尺寸:≥100mm×70mm×80mm;外形尺寸:≥350mm×180mm×450mm;工件种类:≥3种9个;带传感器,能自动识别仓储情况。
11、多种末端工具模块:由4种夹具组成,配合机器人使用作搬运、涂胶、焊接、码垛等用途。配置快换公头1个、快换母头4个、搬运夹具2套、涂胶夹具1套、焊接工具1套、电磁阀3个,并标准固定机构,移动式底板。能对多种物料进行处理,学员可根据要求选择一种方式或两种方式同时使用,满足教学多样性及自主选择性。
12、安全护栏:用来防止机器人在自动运行过程中由于人为的进入导致的安全事故主;立柱用≥50×50×t5 mm,黄色烤漆,可拆装,围栏高度≥1.2m; 立柱之间用网格钢丝搭接,灰色烤漆网格,带安全帽支架;设有急停按钮和安全插销开关;设置安全门,当需要检修系统时,人员可通过安全门进入机器人动作区域,此时安全门上的安全开关会被断开,禁止机器人的自动启动,保证人身安全。表面光洁无毛刺,规格:≥3000×3000×1200mm。
四、教学系统及软件资源要求
(一)智能制造生产线虚拟仿真系统软件
(二)数字孪生技术实训系统
(三)云智能实验室安全管理系统
(四)工业自动化控制实训系统
(五)教学课件资源
1、工业机器人课程资源
2、PLC编程教学课件资源
五、实训项目
1、工业机器人的基本认识
2、工业机器人示教器运动操作
3、工业机器人的点位示教
4、工业机器人基本参数设置
5、工业机器人基本运动指示学习
6、工业机器人基于示教器的程序编辑
7、工业机器人IO控制应用
8、工业机器人基本接线方法
9、轨迹运行编程与示教
10、平面圆形描图任务编程与示教
11、平面矩形描图任务编程与示教
12、曲面圆形描图任务编程与示教
13、曲面矩形描图任务编程与示教
14、固定位置搬运编程与示教
15、平面位置搬运装配编程与示教
16、斜面位置搬运装配编程与示教
17、平面矩阵立体码垛编程与示教
18、模型涂胶装配编程与示教
19、视觉检测的编程与示教
20、固定位置搬运编程与示教
21、工业机器人与抓手夹具配合是应用
22、自动仓储编程与示教
23、工业机器人与快换配合是应用
24、伺服电机及变位机的编程与示教
25、传送带的变频调速编程与示教